Baixar para ler offline


![Mtp = Ftp . Rp > Ftp = Mtp / Rp.
O raio do pinhão é calculado como: rp = dp / 2 = (m. Z) / 2
Potência
Potência no movimento circular uniforme (MCU) N = MT . ω (torque multiplicado pela velocidade angular)
Potência no movimento retilíneo uniforme (MRU) N = F. v (força multiplicada pela velocidade “retilínea” ou tangencial)
Velocidade angular ω = 2.π. n / 60 , onde “n” é a rotação medida em [RPM], a velocidade angular é medida em [rad / s]
Torque ou momento torçor
Torque é o esforço que faz girar um eixo ou um corpo em torno de um ponto (ou eixo). O torque, ou simplesmente momento, é
sempre o produto de uma força pela distância, medida perpendicularmente à reta de ação desta força, até o centro de giro.
Para calcular o torque que aciona um eixo conhecendo a rotação em [RPM[ e a potência de acionamento (em cv) usamos as
seguintes relações:
Para o torque em [N.mm], a potência em [cv] e a rotação em [RPM]
MT [N.mm] = 7,0235 . 106 . N [cv] / n [RPM]
Para o torque em [kgf.cm], a potência em [cv] e a rotação em [RPM]
MT [kgf.cm] = 71.620 N [cv] / n [RPM]
Para o torque em [kgf.m], a potência em [cv] e a rotação em [RPM]
MT [kgf.m] = 716,2 N [cv] / n [RPM]
Equivalência de unidades
1 N = 0,10197 kgf
1 kfg = 9,80665 N
1cv = 0,98632 HP
1 cv = 735,5 w
1 HP = 746 w
1 w = 1 J / s
1 w = 1 N. m / s
1 J = 1 N. m
1 kgf.m = 9,8 J
1 GPa = 103 MPa = 103 N / mm2
1 Pa = 1N / mm2
1 cv = 75 kgf.m/s](https://image.slidesharecdn.com/transmiss-engrenagens-160722032159/85/Transmiss-engrenagens-4-320.jpg)

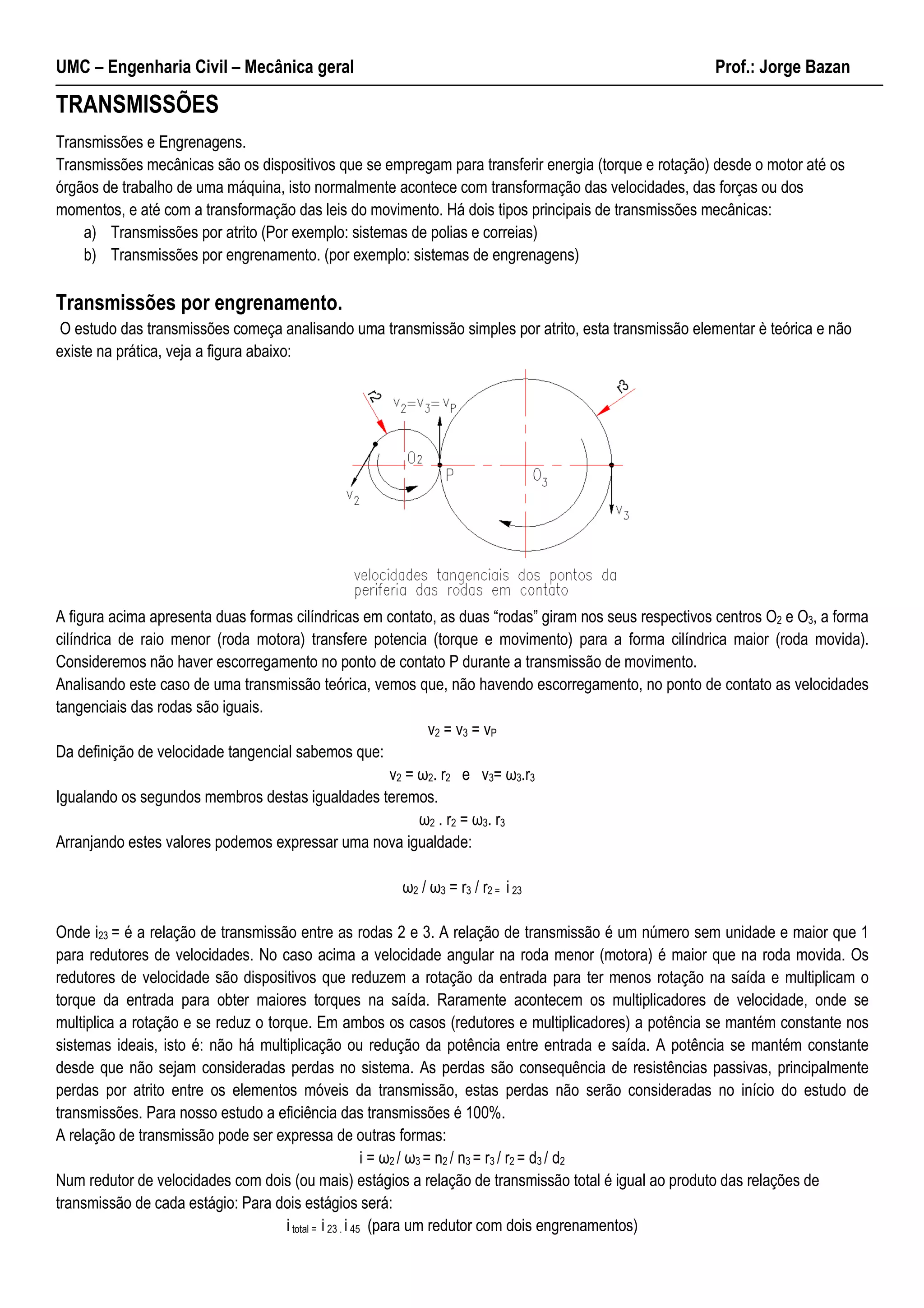
O documento discute transmissões mecânicas, especificamente engrenagens. Explica que transmissões transferem energia entre motores e máquinas, geralmente alterando velocidades ou forças. Detalha os tipos principais de transmissão e como engrenagens funcionam para transmitir torque usando dentes e relações de transmissão entre velocidades angulares e raios. Fornece fórmulas para cálculo de parâmetros-chave como torque, potência e velocidade em sistemas de engrenagem.
























![Bíblia mecanica automotiva[1]](https://cdn.slidesharecdn.com/ss_thumbnails/bbliamecanicaautomotiva1-140320112712-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)






![Engrenagem teoria completa[1]](https://cdn.slidesharecdn.com/ss_thumbnails/engrenagemteoriacompleta1-141202061309-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)
![Engrenagem teoria completa[1]](https://cdn.slidesharecdn.com/ss_thumbnails/engrenagemteoriacompleta1-141202061304-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)
![Engrenagem teoria completa[1]](https://cdn.slidesharecdn.com/ss_thumbnails/engrenagemteoriacompleta1-180925140702-thumbnail.jpg?width=640&height=640&fit=bounds)


























