Baixar para ler offline



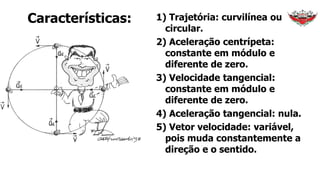

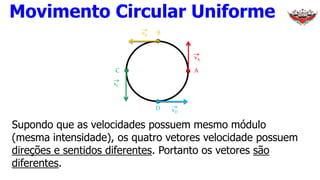

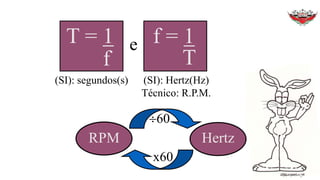
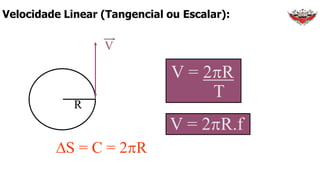
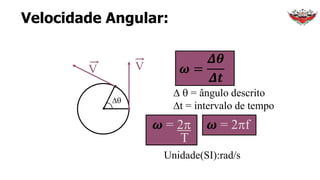
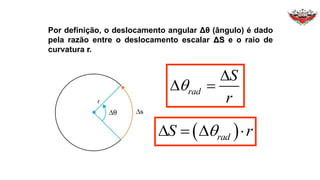
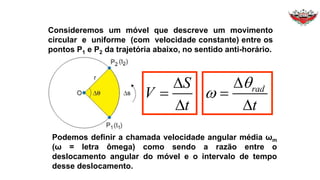
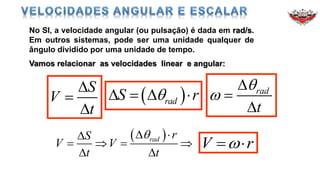
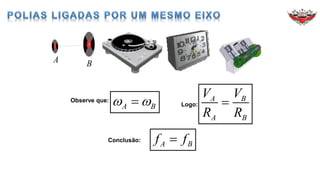
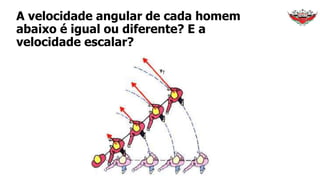


1) O documento discute conceitos sobre movimento circular uniforme, incluindo velocidade linear, angular e relações entre elas. 2) É apresentado que a velocidade angular é constante no movimento circular uniforme. 3) Exemplos como satélites e ponteiros de relógio ilustram o movimento circular uniforme.