Baixado 32 vezes








![Lista de Exercícios extras para P1. Monitoria de Vibrações I – R. 2015/1. Monitor: Gustavo Frez
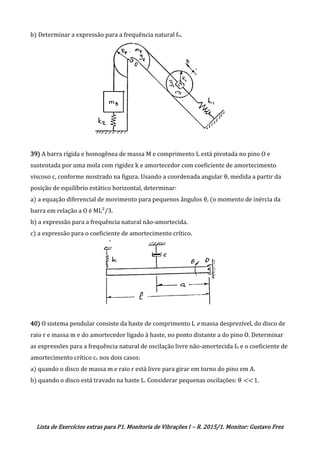
b) ωn = √
2k
3m
c) ζ =
c
√6km
16) (
2
5
m1r2
+ m1L1
2
+
1
3
m2L2
2
) θ̈ + cL1
2
θ̇ + (kL1
2
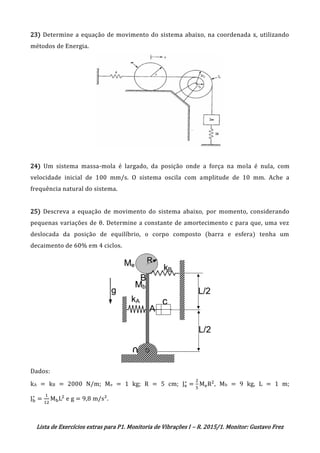
− m1gL1 −
m2gL2
2
) θ = 0
17) ωn =
√
kt + kL2
2
+ (
m2g(L2 − L1)
2
)
J0 + m1L2
2
18) y(t) = [2cos(14142,14t)] μm
19) keq ≈ 4,69 ∙ 105 N/m
20) ωn ≈ 17,638 rad/s; ζ ≈ 0,315 Sub amortecido; ωd ≈ 16,740 rad/s
21) k ≈ 2,22 ∙ 105 N/m; d ≈ 4,63 ∙ 102 N∙s/m
22) a)
667
384
mL2
θ̈ +
1
4
cL2
θ̇ + (
9
16
kL2
−
1
4
Lmg) θ = 0
b) ωn ≈ 11,36 rad/s; ζ ≈ 0,633 (Sub-amortecido); ωd ≈ 6,79 rad/s
23) (m +
J
r1
2 + 4M) ẍ + 9kx = 0
24) ωn = 10 rad/s
25) 4,1035θ̈ + 0,25cθ̇ + 2445,5545θ = 0; c ≈ 29,198 N∙s/m
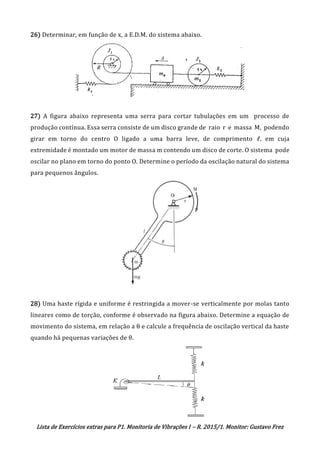
26) (m0 + m1 +
J1
r1
2 +
J2
r2
2) ẍ + (k1 (
R
r1
)
2
+ k2) x = 0
27) T = 2π√
m(ℓ + r)2 +
Mr2
2
mg(l + r)
28)
mL2
3
θ̈ + Kθ + 2kL2
sen(θ) = 0; ωn = √
3K + 6kL2
mL2
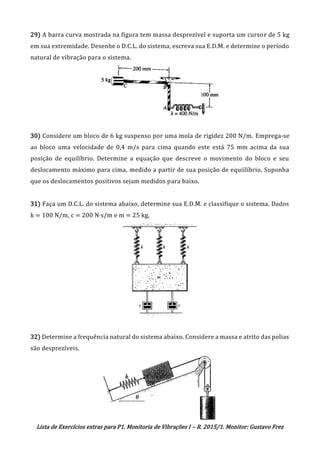
29) θ̈ + 20θ = 0; T ≈1,405 s
30) y(t) = [−0,0693 sem(5,774t) − 0,075 cos (5,774t)] m; Ymáx = 0,102 m.
31) ÿ + 16ẏ + 12y = 0; Superamortecido
32) ωn = √4k/5m
33) δst = 0,2 m; T = 0,898 s; y(3) = −0,0548 m; ẏmáx = 0,7 m/s; ÿmáx = 4,9 m/s²
34) d = 1,721 N∙s/m
35) meq = m +
Jp
rp
2
+
1
3
m1l1
2
rp
2
+
m2l1
2
rp
2
+
1
2
mcl1
2
rp
2
+
mcl1
2
rp
2](https://image.slidesharecdn.com/360693996-lista-de-exercicios-extras-para-p1-de-vibracoes-i-r-191117224552/85/360693996-lista-de-exercicios-extras-para-p1-de-vibracoes-i-r-17-320.jpg)


Este documento é uma lista de exercícios extras para a disciplina de Vibrações I, contendo 41 exercícios sobre sistemas oscilatórios e vibratórios. O monitor Gustavo Frez fornece esta lista complementar de exercícios além da lista do professor, para ajudar os alunos a melhor entenderem os conceitos da disciplina.










![[Solução] rao vibrações mecanicas 4ª](https://cdn.slidesharecdn.com/ss_thumbnails/soluoraovibraesmecanicas-4-160913015646-thumbnail.jpg?width=640&height=640&fit=bounds)































