Baixado 1.670 vezes


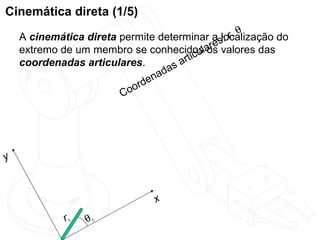
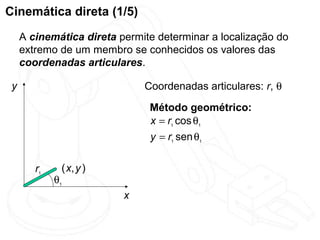
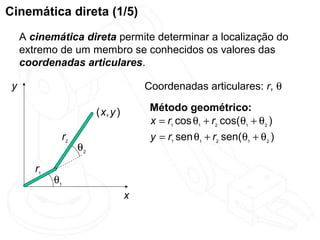
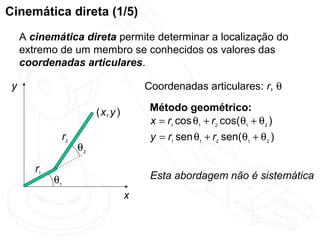
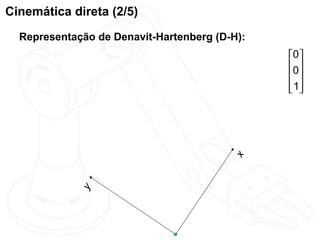
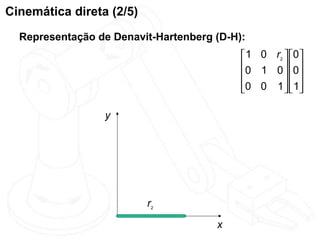
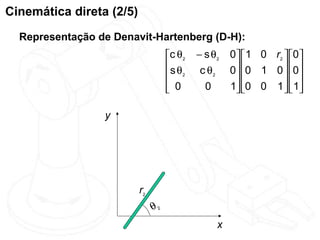
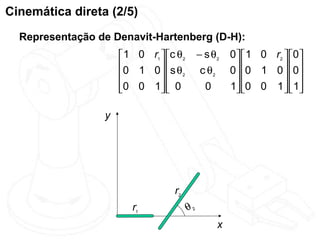
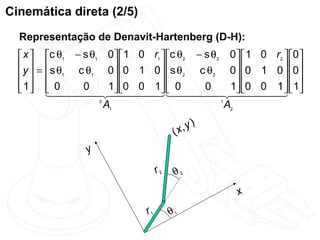
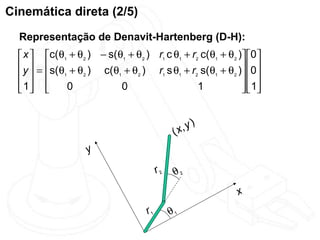
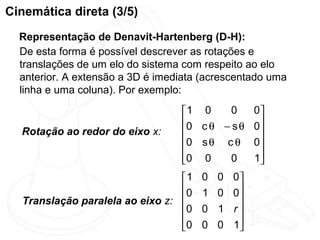
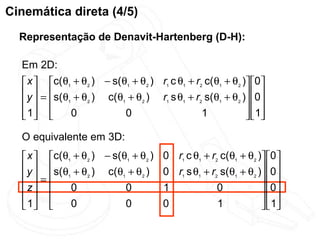
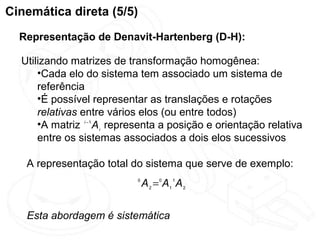
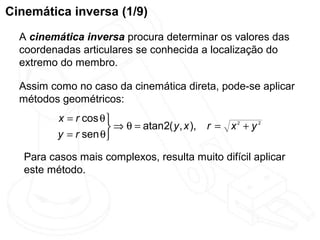
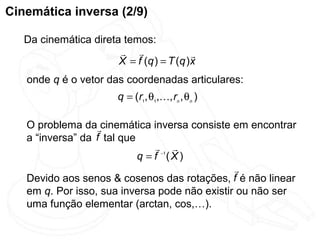
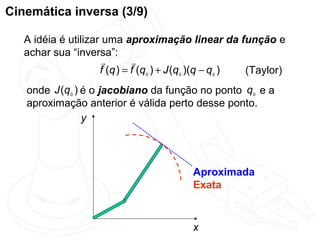
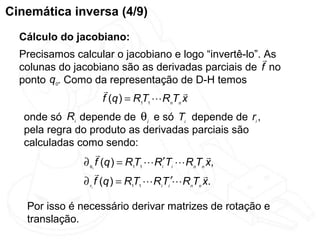
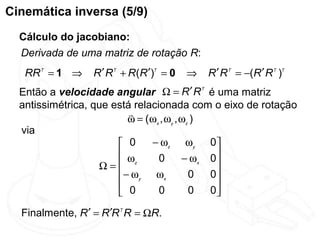
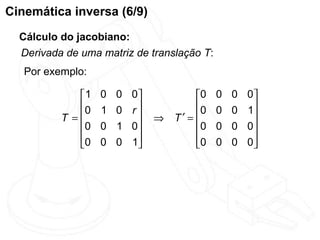
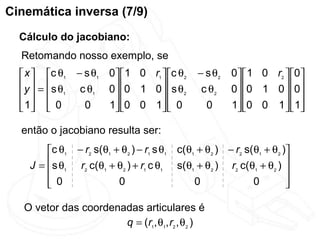
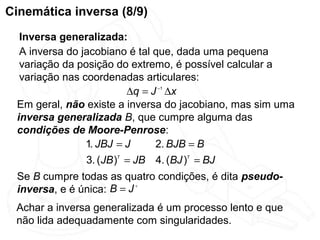
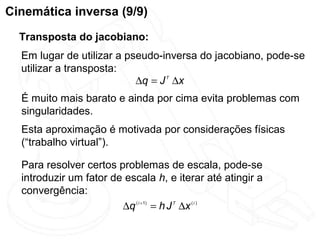

O documento discute cinemática direta e inversa de robôs. A cinemática direta determina a posição final de um robô dado seus ângulos de articulação, enquanto a cinemática inversa calcula os ângulos de articulação necessários para alcançar uma posição final específica. A representação de Denavit-Hartenberg é usada para descrever as transformações entre os elos de um robô. O jacobiano é calculado para aproximar linearmente a cinemática inversa.



























