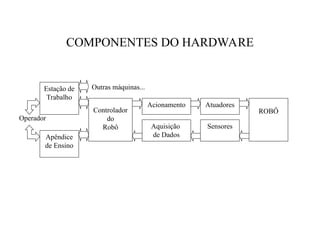
O documento apresenta uma introdução à robótica, abordando conceitos fundamentais de robôs manipuladores, sua estrutura, evolução histórica e aplicações em automação industrial. Descreve também os componentes do hardware, métodos de programação e controle, assim como a dinâmica e cinemática relevantes para o funcionamento dos robôs. Além disso, discute a importância de sensores, atuadores e algoritmos de controle no desempenho dessas máquinas.