Transferir como PDF, PPTX


![Agentes que planejam
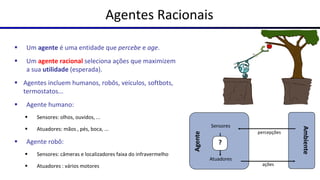
▪ Um agente que planeja:
▪ Toma decisões com base nas consequências de
suas ações
▪ Deve obrigatoriamente ter um modelo de como
o mundo evolui em resposta a suas ações
▪ Deve obrigatoriamente formular um objetivo
▪ planejamento completo versus ótimo
▪ Alguma solução versus a melhor solução
▪ planejamento versus replanejamento
[Demo: replanning (L2D3)]
[Demo: mastermind (L2D4)]
11](https://image.slidesharecdn.com/ia-02-agenteseproblemasdebusca-190222131736/85/Aula-02-Agentes-e-problemas-de-busca-11-320.jpg)

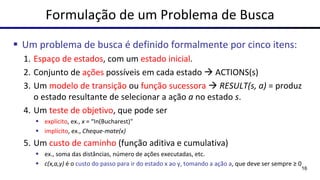
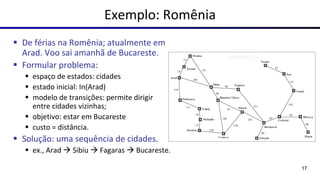
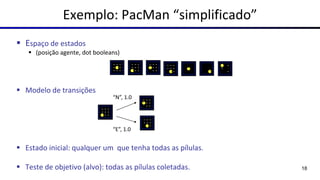
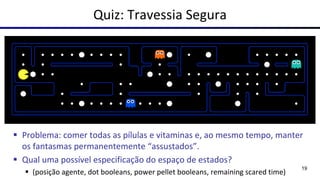

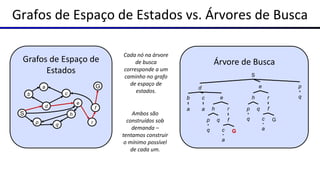
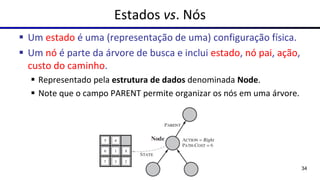
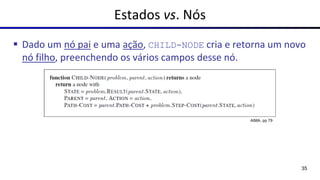
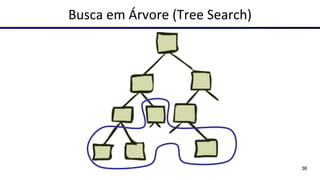
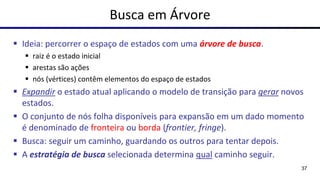
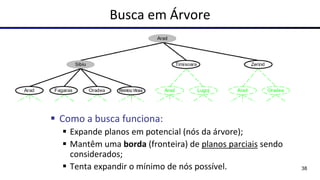
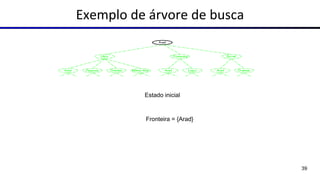
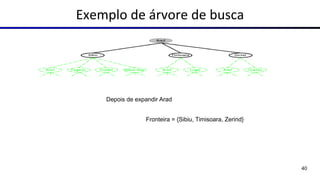
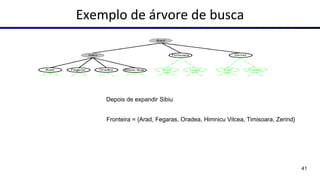
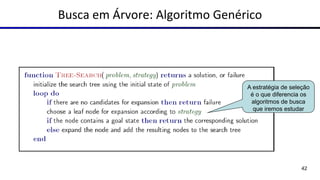
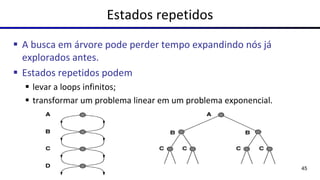

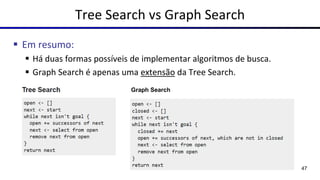
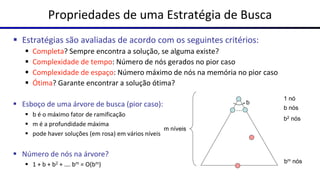


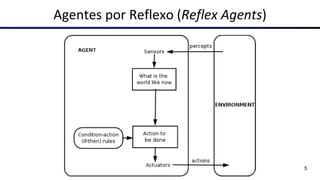
Este documento fornece uma visão geral sobre agentes e problemas de busca em inteligência artificial. Discute os conceitos de agentes, tipos de agentes, agentes que planejam, problemas de busca, espaço de estados, árvore de busca, grafo de espaço de estados e estratégias de busca.























































































