Transferir como PDF, PPTX









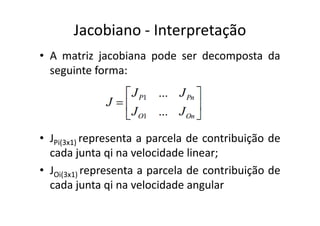










O documento discute a cinemática diferencial de manipuladores seriais, abordando o Jacobiano direto e inverso, que relacionam as velocidades das juntas com as velocidades do efetuador final. Também apresenta exemplos de singularidades, situações nas quais o Jacobiano inverso não está definido e velocidades infinitas seriam necessárias para manter velocidades no espaço de trabalho.





















































