Transferir como PDF, PPTX


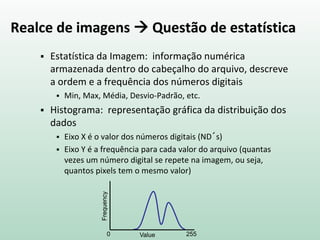
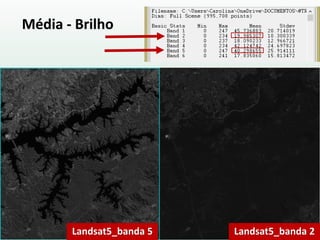
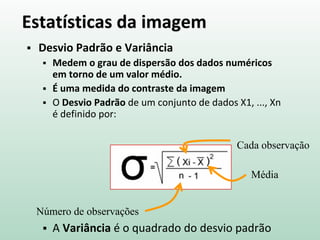
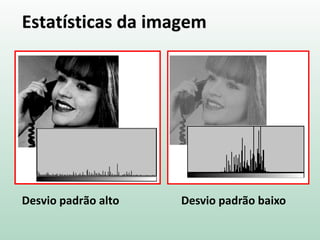
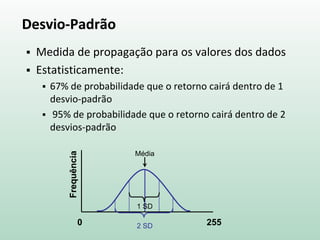
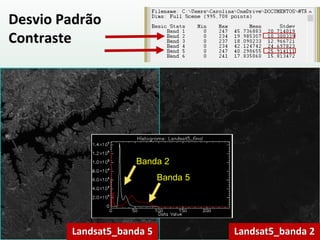
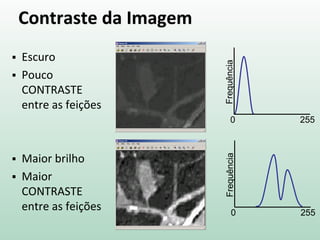
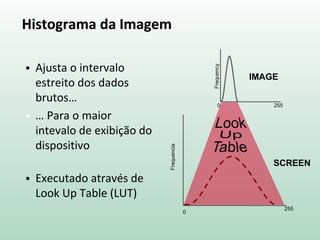
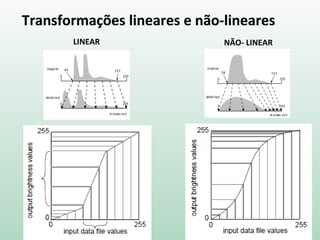
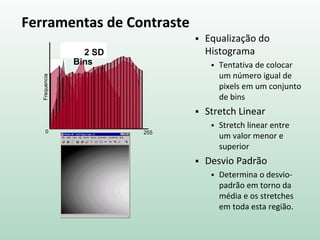
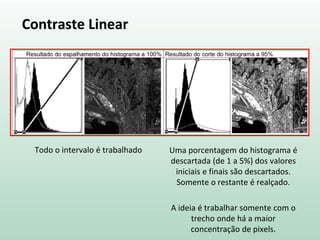
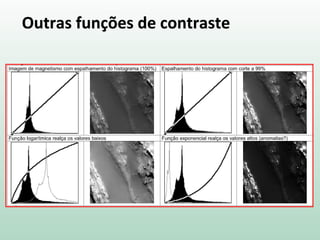

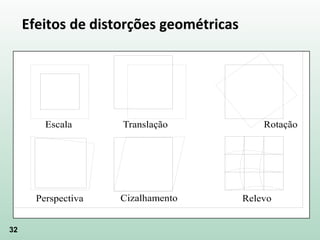
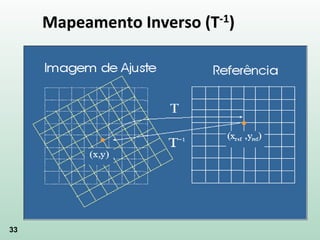
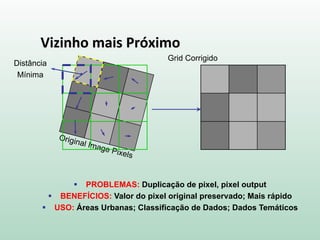
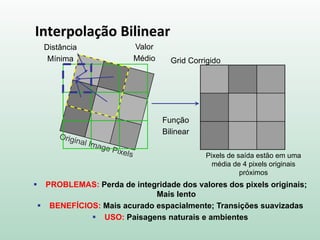
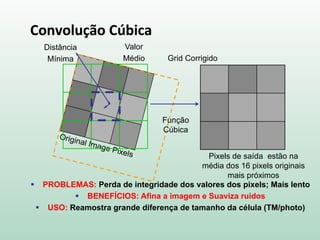
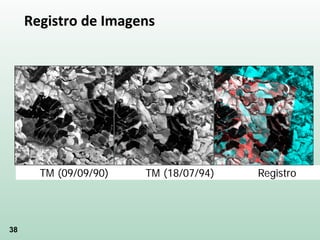
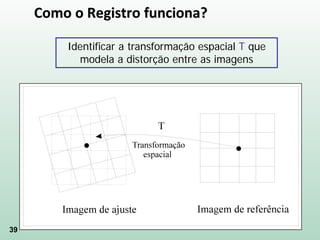



O documento discute pré-processamento de imagens de sensoriamento remoto, incluindo correção geométrica e radiométrica. Dois tipos de pré-processamento são descritos: correções de distorções e processos para facilitar a extração de informações, como realce por contraste. Técnicas como equalização de histograma, stretch linear e desvio-padrão são explicadas.























































































