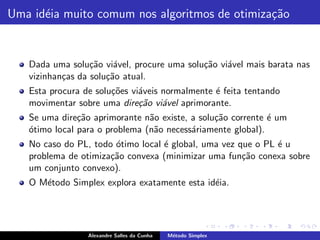
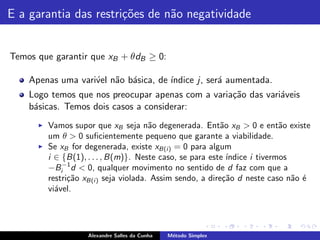
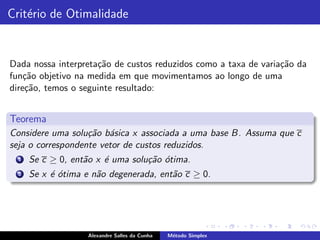
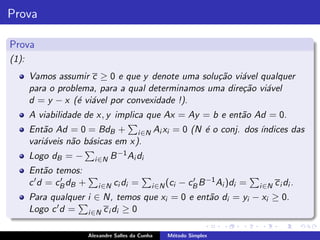
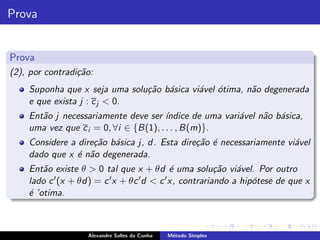
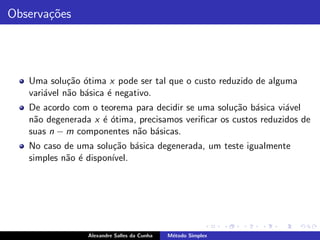
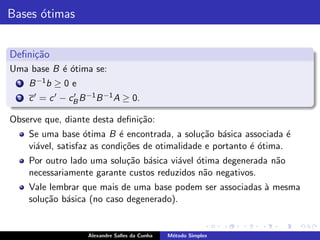
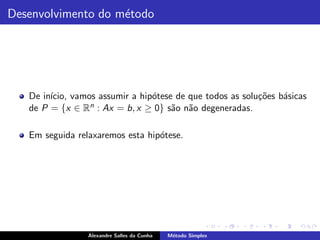
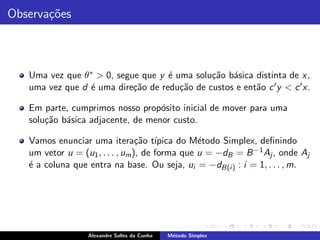
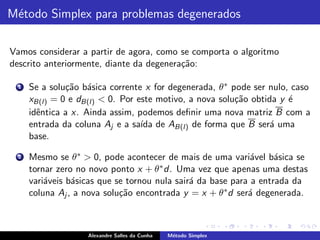
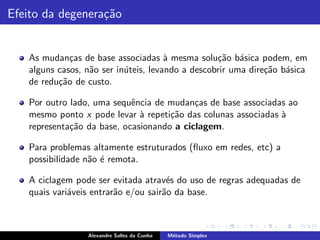
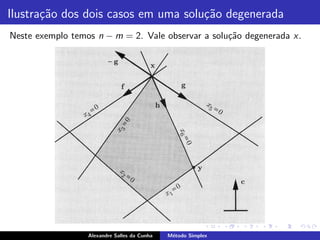
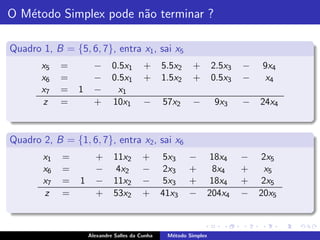
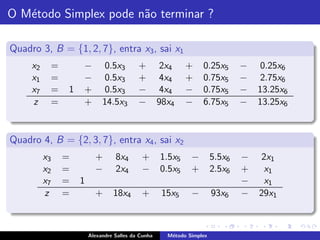
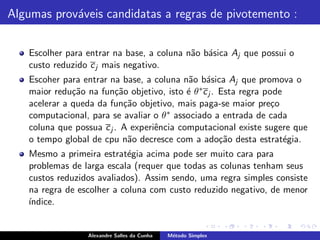
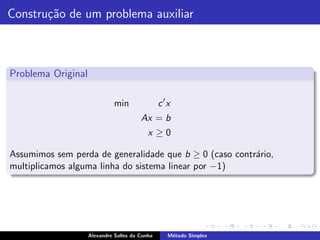
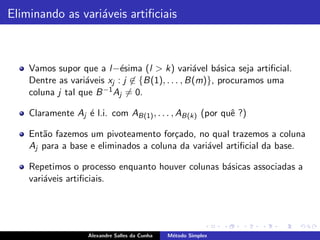
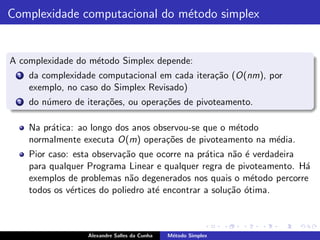
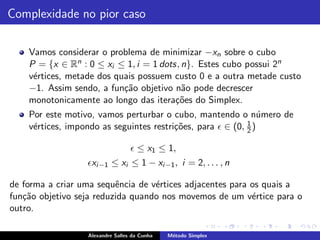
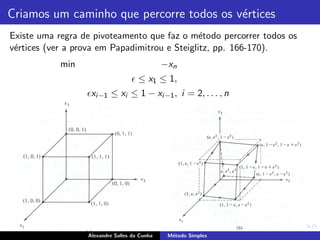
Este documento apresenta os conceitos fundamentais do método simplex para resolver problemas de programação linear. Ele explica que o método simplex se baseia no fato de que, se um problema linear possui uma solução ótima, então existe uma solução básica ótima viável. O documento também descreve como o método simplex move de uma solução básica viável para outra de menor custo, até encontrar a solução ótima.
![Exemplo
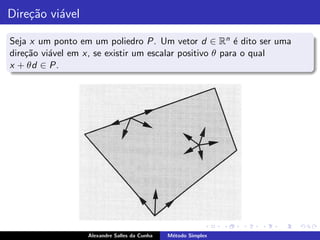
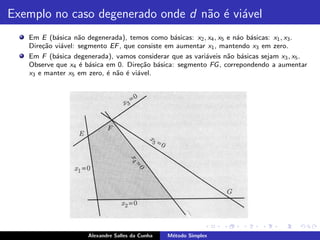
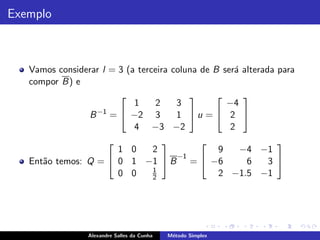
Vamos considerar o seguinte exemplo:
min c1 x1 + c2 x2 + cc x3 + c4 x4
s.t.: x1 + x2 + x3 + x4 = 2
2x1 + 3x3 + 4x4 = 2
x ≥0
Fazendo B = [A1 A2 ], temos uma matriz cujas colunas s˜o l.i.
a
Fixando x3 = x4 = 0 e resolvendo o sistema, (x1 , x2 ) = (1, 1).
Assumindo que d seja a dire¸˜o b´sica associada a vari´vel n˜o b´sica
ca a a a a
x3 , temos: dB = −B −1 A3 = [− 3 2 ]′ .
2
1
c 3 = c3 − 3c1 /2 + c2 /2
Alexandre Salles da Cunha M´todo Simplex
e](https://image.slidesharecdn.com/simplex-120311172412-phpapp02/85/Robson-3-Metodo-Simplex-11-320.jpg)
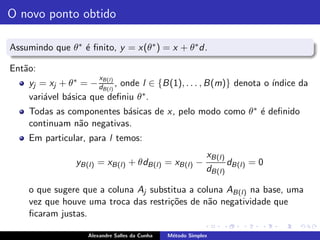
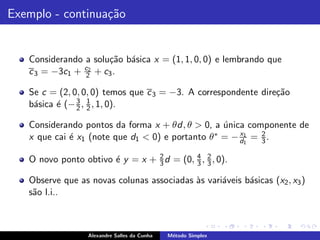
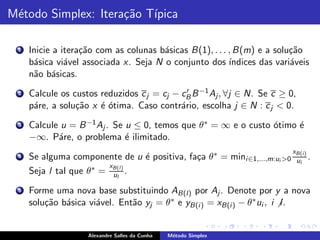
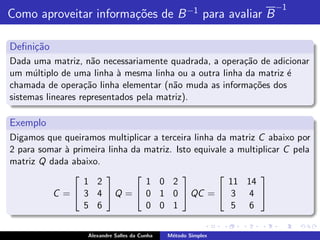
![A nova base
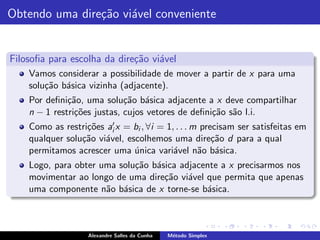
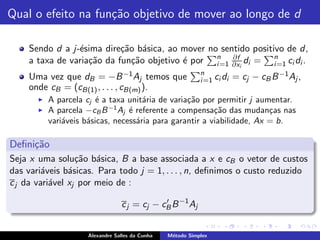
A nova base B ´ dada por:
e
B = [AB(1) , . . . , AB(l−1) , AB(j) , AB(l+1) , . . . , AB(m) ]
Equivalentemente, o novo conjunto de vari´veis b´sicas ´
a a e
{B(1), . . . , B(l − 1), B(j), B(l + 1), . . . , B(m)}
Mais formalmente:
Teorema
1 As colunas AB(i ) : i = l e Aj s˜o linearmente independentes e, assim,
a
B ´ uma matriz b´sica.
e a
2 O vetor y = x + θ ∗ d ´ a solu¸˜o b´sica associada a B.
e ca a
Alexandre Salles da Cunha M´todo Simplex
e](https://image.slidesharecdn.com/simplex-120311172412-phpapp02/85/Robson-3-Metodo-Simplex-23-320.jpg)
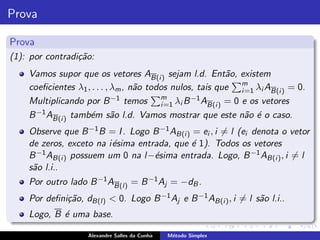
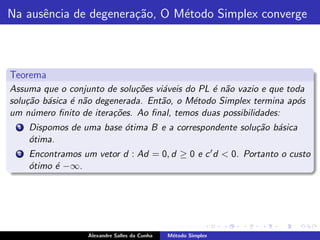
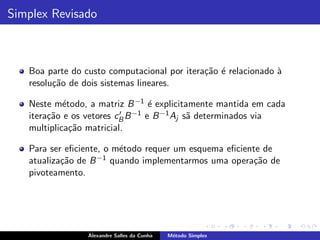
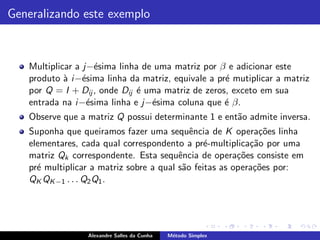
![Simplex Revisado
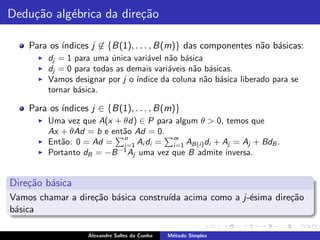
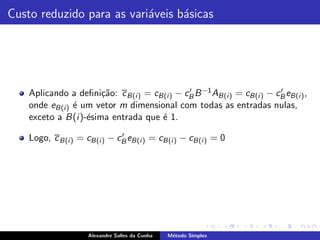
Base no in´ da itera¸˜o: B = [AB(1) , . . . , AB(m) ]
ıcio ca
Base ao fim da itera¸˜o: ca
B = [AB(1) , . . . , AB(l−1) , AB(j) , AB(l+1) , . . . , AB(m) ]
Todas, exceto uma coluna de B e B s˜o compartilhadas.
a
Em fun¸˜o disto, ´ razo´vel esperar que B −1 contenha informa¸˜o
ca e a ca
−1
que possa ser usada na determina¸˜o de B .
ca
Alexandre Salles da Cunha M´todo Simplex
e](https://image.slidesharecdn.com/simplex-120311172412-phpapp02/85/Robson-3-Metodo-Simplex-43-320.jpg)
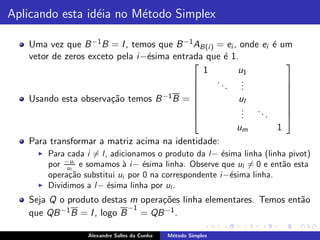
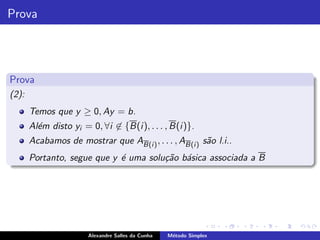
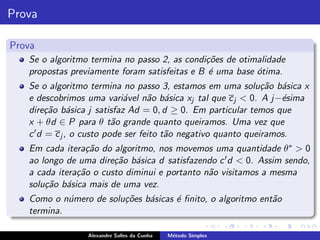
![M´todo Simplex Revisado
e
Vamos adicionar o seguinte passo ao final da quinta opera¸˜o na itera¸˜o
ca ca
t´
ıpica:
Forme a matriz m × (m + 1) dada por: [B −1 | u].
Fa¸a as opera¸˜es linha elementares necess´rias para transformar a
c co a
ultima coluna desta matriz no vetor unit´rio el .
´ a
−1
As primeiras m colunas da matriz resultante fornece B .
Observe que recalcular a inversa da base agora custa O(m2 ). Desta forma,
apenas na primeira invers˜o da base, pagamos o O(m3 ). Desta forma,
a
reduzimos o custo de cada itera¸˜o para O(nm + m2 )
ca
Alexandre Salles da Cunha M´todo Simplex
e](https://image.slidesharecdn.com/simplex-120311172412-phpapp02/85/Robson-3-Metodo-Simplex-48-320.jpg)
![[Robson] 7. Programação Não Linear Irrestrita](https://cdn.slidesharecdn.com/ss_thumbnails/irrestrita01-120311165949-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Robson] 6. Otimização de Grande Porte](https://cdn.slidesharecdn.com/ss_thumbnails/column-120310161439-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Alexandre] 8. Não Linear Restrita](https://cdn.slidesharecdn.com/ss_thumbnails/restrita-01-120327145714-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Alexandre] 2. Geometria](https://cdn.slidesharecdn.com/ss_thumbnails/geometria-120327135217-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Robson] 1. Programação Linear](https://cdn.slidesharecdn.com/ss_thumbnails/pl-111210174628-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Robson] 5. Análise de Sensibilidade](https://cdn.slidesharecdn.com/ss_thumbnails/sensibilidade-120311174016-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Robson] 4. Dualidade](https://cdn.slidesharecdn.com/ss_thumbnails/dualidade-120311163806-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)







































