Transferir como PDF, PPTX

![Exemplo: Aves no Pantanal
Avistamentos por local durante cinco dias
29 locais no pantanal
Outubro de 2012
Covariados:
– Locais: habitat
([campo, mata] ou [área alagado, água])
– Período de amostragem: cobertura de nuvens](https://image.slidesharecdn.com/modelosdeocupao-130111103816-phpapp02/85/Modelos-de-ocupacao-33-320.jpg)

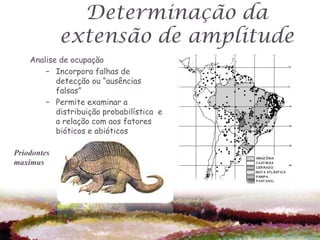
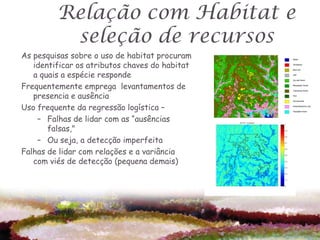
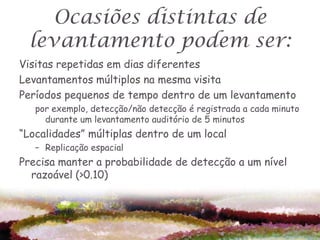
O documento discute métodos para estimar a probabilidade de ocupação de localidades por espécies, levando em conta a probabilidade de detecção imperfeita. Os métodos envolvem amostragem múltipla de localidades ao longo do tempo para estimar a probabilidade de ocupação e detecção usando modelos probabilísticos de máxima verossimilhança. Covariáveis podem ser incluídas para explicar variação espacial e temporal na ocupação e detecção.









![[Palestra] Prof Nussio: Volumosos para Bovinos - III Seminário Confinatto](https://cdn.slidesharecdn.com/ss_thumbnails/profnussiovolumososparabovinosconfinatto-120330142857-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)



![Apostila dendrologia agosto_2007[1]](https://cdn.slidesharecdn.com/ss_thumbnails/apostiladendrologiaagosto20071-121209064035-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)









































































