Transferir como PDF, PPTX


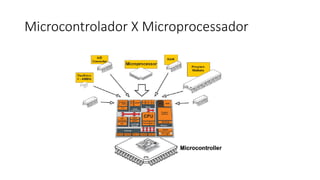
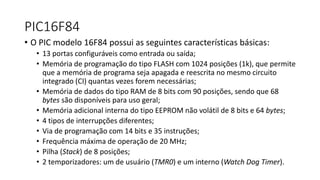
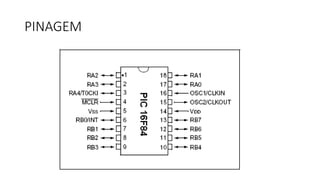
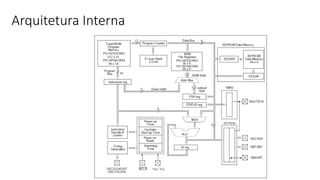
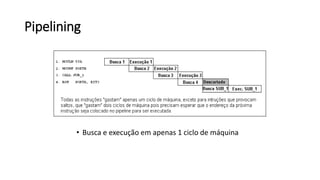
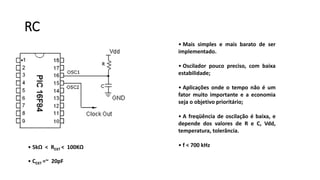

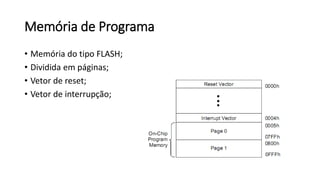

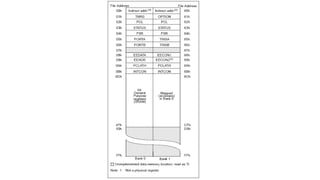

O documento descreve a estrutura e aplicações dos microcontroladores PIC, com foco no PIC16F84. Ele explica que os microcontroladores PIC possuem memória de programa, memória de dados, ULA e portas I/O, e que o PIC16F84 tem 13 portas I/O, memória FLASH de 1k e RAM de 90 bytes. Por fim, discute aspectos como osciladores, organização de memória e timers.























































































