Baixado 1.293 vezes





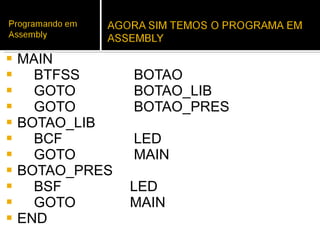
![Insira um contato em série com uma saída. Xbotao YLamp |----] [---------------------------( )----| Dê um nome ao contato e um nome à saída. Determine um pino (bit de um port) para corresponder àquela instrução Compile e carregue para a memória do uC (Proteus ou real).](https://image.slidesharecdn.com/programaobsicademicrocontroladores-100515112617-phpapp02/85/Programacao-basica-de-microcontroladores-58-320.jpg)

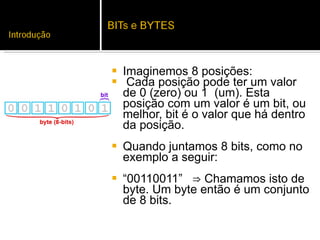
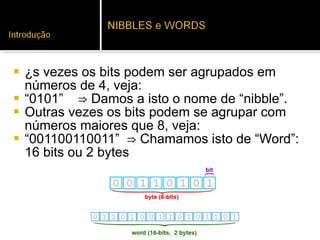
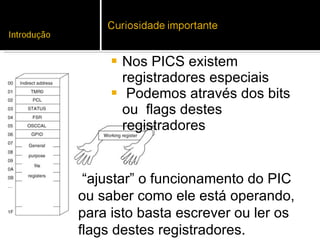
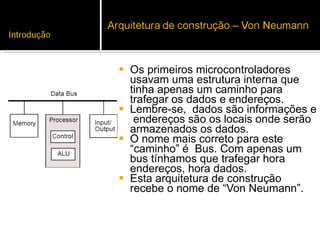
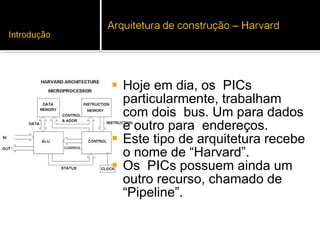
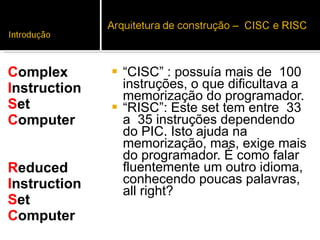
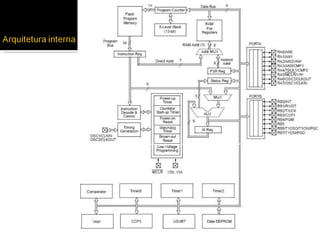
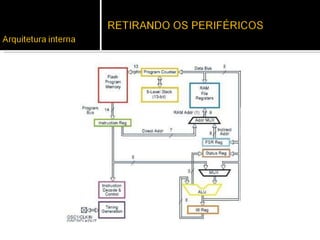
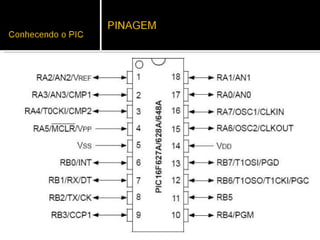
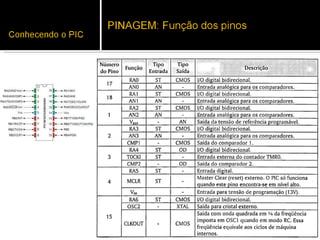
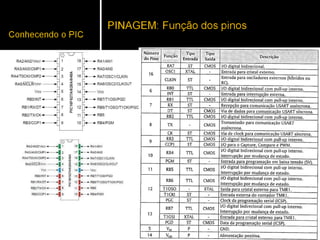
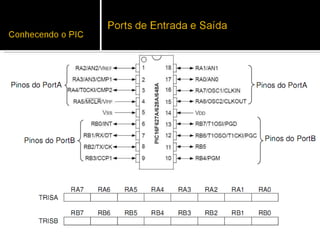
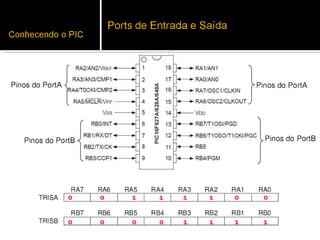
O documento aborda a arquitetura e funcionamento de microcontroladores, com ênfase nos PICs, incluindo sua memória, instruções e recursos como o watchdog e USART. Explica a diferença entre microprocessadores e microcontroladores, além de conceitos fundamentais como bits, bytes e nibbles. Também fornece orientações sobre como programar e implementar circuitos utilizando esses componentes em projetos práticos.























































































