Baixar para ler offline




![Escola Politécnica USP Experiência – Microcontroladores PIC
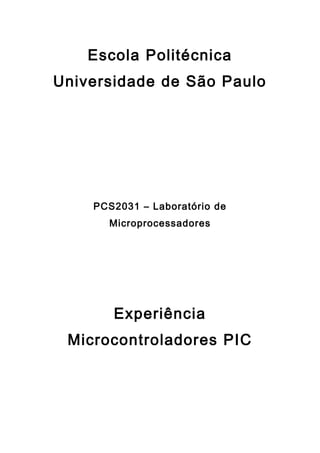
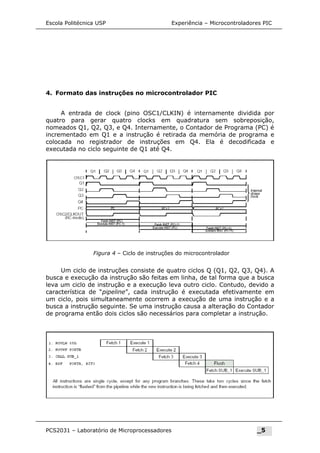
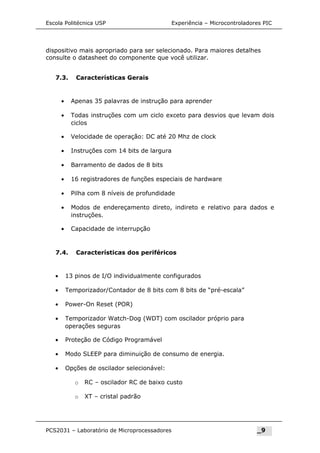
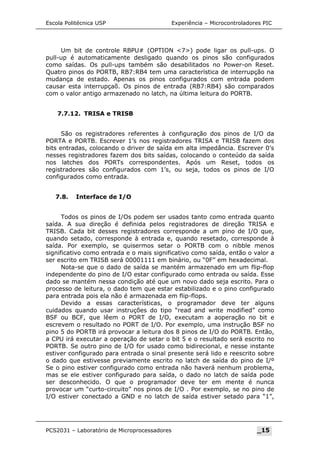
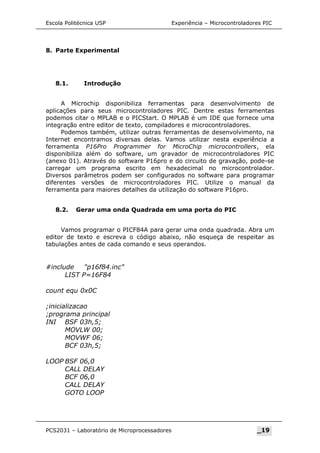
Para verificar o funcionamento do programa, vamos implementar um
circuito de teste (figura 11). Este circuito deve ligar a porta RB0 do
microcontrolador a um led. Deve-se também ligar um oscilador ao PIC, ele
será à base dos seus ciclos de instrução (ver manual). O oscilador será um
cristal, com freqüência e configuração de montagem especificada no manual
do PICF84A [2].
Configurações do Circuito [2]
C1 15 - 33 pF
XTAL 4 - 10 MHz
R1 1KΩ
PCS2031 – Laboratório de Microprocessadores _21
LED
OSC1/IN
XTAL PICF84A
VDD
VSS
MCLRT
OSC1/OUT
C1
C1
R1
RB0
Figura 11 – Circuito de teste](https://image.slidesharecdn.com/pcs2031projeto01introducaopicv4-140621133117-phpapp01/85/Pcs2031-projeto01-introducao_pic_v4-21-320.jpg)
![Experiência – Microcontroladores PIC Escola Politécnica USP
9. Bibliografia
• [1] Microchip PIC16F8X Datasheet – www.microchip.com
• [2] Projetos de Hardware e Software utilizando
Microcontroladores PIC – Edmur Canazian - 1999
• [3] P16Pro Programmer for MicroChip microcontrollers – Short
Manual
_22 PCS2031 – Laboratório de Microprocessadores](https://image.slidesharecdn.com/pcs2031projeto01introducaopicv4-140621133117-phpapp01/85/Pcs2031-projeto01-introducao_pic_v4-22-320.jpg)

Este documento descreve uma experiência com microcontroladores PIC. Ele fornece uma introdução à família PIC, sua arquitetura RISC e características. Também discute a família PIC16F84A, incluindo sua memória, registradores e periféricos. O objetivo da experiência é gerar uma onda quadrada usando um PIC.














![[6/9] Sistemas embarcados de alto desempenho para tratamento e processamento ...](https://cdn.slidesharecdn.com/ss_thumbnails/05-cmsis-171031095533-thumbnail.jpg?width=640&height=640&fit=bounds)

![[4/9] Sistemas embarcados de alto desempenho para tratamento e processamento ...](https://cdn.slidesharecdn.com/ss_thumbnails/03-cubeworkbench-171031095316-thumbnail.jpg?width=640&height=640&fit=bounds)