1) O documento apresenta informações sobre microcontroladores PIC, incluindo estrutura interna, memórias, registradores, conjunto de instruções e osciladores.
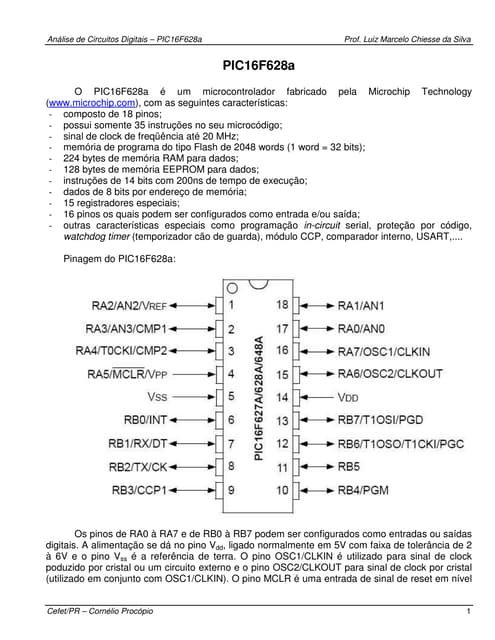
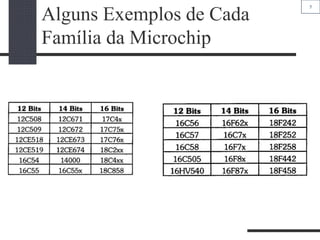
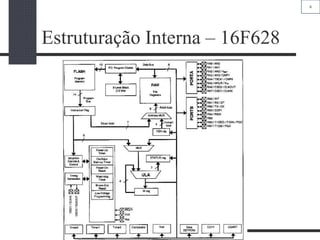
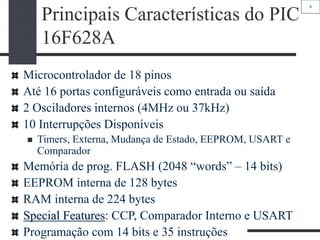
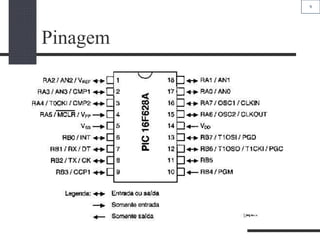
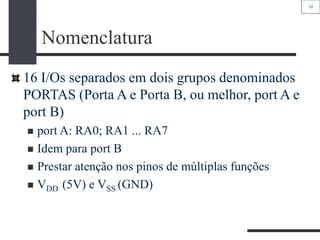
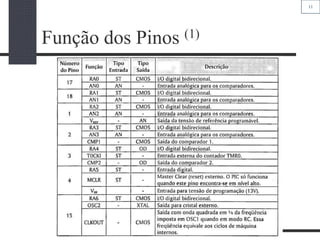
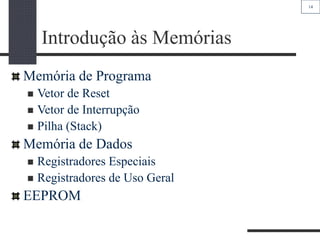
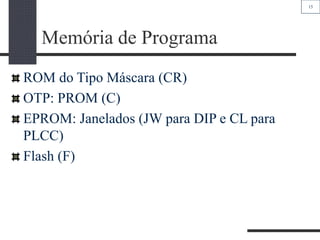
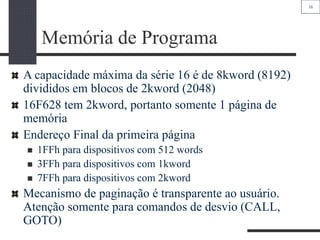
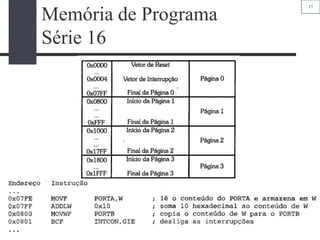
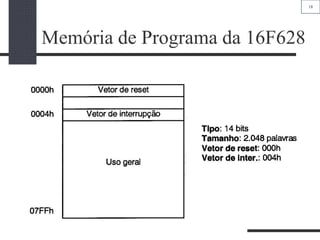
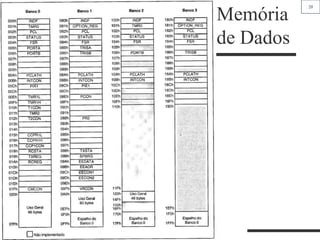
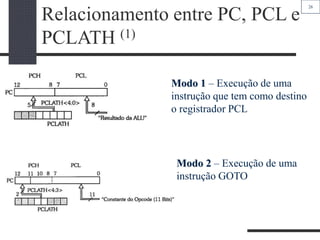
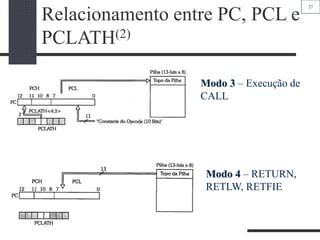
2) São descritos os principais componentes do PIC16F628 como memórias de programa e dados, registradores especiais, pilha e vetores de interrupção.
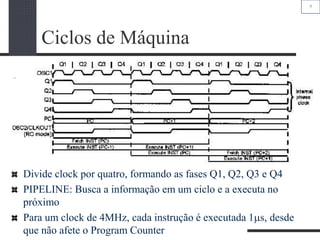
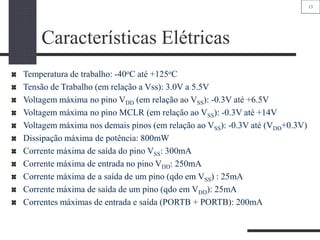
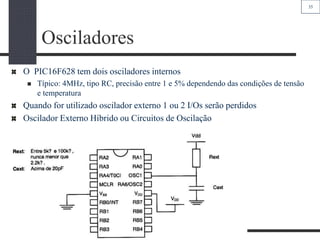
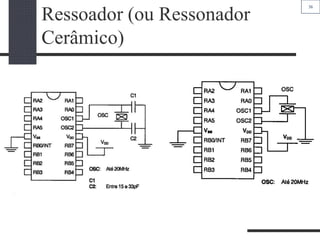
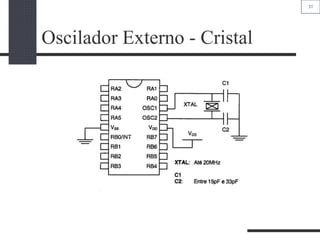
3) O documento explica conceitos como arquitetura Harvard, ciclos de máquina e funcionamento básico dos osciladores internos e externos do PIC16F628.

























![[2/9] Sistemas embarcados de alto desempenho para tratamento e processamento ...](https://cdn.slidesharecdn.com/ss_thumbnails/01-cortexm-171031094440-thumbnail.jpg?width=640&height=640&fit=bounds)