
Recomendados
Mais conteúdo relacionado
Mais procurados
Mais procurados (15)
Destaque
Semelhante a Interseção de retas_e_de_planos
Semelhante a Interseção de retas_e_de_planos (20)
Último
Último (20)
Interseção de retas_e_de_planos
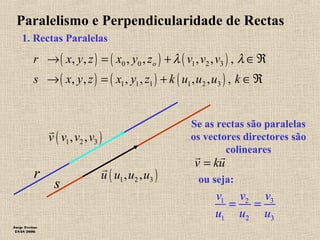
- 1. Paralelismo e Perpendicularidade de Rectas 1. Rectas Paralelas r → ( x, y , z ) = ( x0 , y0 , zo ) + λ ( v1 , v2 , v3 ) , λ ∈ℜ s → ( x, y , z ) = ( x1 , y1 , z1 ) + k ( u1 , u2 , u3 ) , k ∈ℜ Se as rectas são paralelas r v ( v1 , v2 , v3 ) os vectores directores são colineares r r r v = ku r u ( u1 , u2 , u3 ) ou seja: s v1 v2 v3 = = u1 u2 u3 Jorge Freitas ESAS 2006
- 2. Exemplo 1 r → ( x, y , z ) = ( −1, 0, 2 ) + λ ( 3, 2, −1) , λ ∈ℜ s → ( x, y, z ) = ( 1, 0, 0 ) + k ( −6, −4, 2 ) , k ∈ℜ • São paralelas porque os vectores r r v ( 3, 2, −1) e u ( −6, −4, 2 ) são colineares r r 3 2 −1 u = −2v ⇔ = = −6 −4 2 Jorge Freitas ESAS 2006
- 3. Exemplo 2 r → ( x, y , z ) = ( −1, 0, 2 ) + λ ( 3, 2, −1) , λ ∈ℜ x −3 y + 2 z −3 s → = = −6 −4 2 • São paralelas porque os vectores r r v ( 3, 2, −1) e u ( −6, −4, 2 ) são colineares r r 3 2 −1 u = −2v ⇔ = = −6 −4 2 Jorge Freitas ESAS 2006
- 4. Paralelismo e Perpendicularidade de Rectas 2. Rectas Perpendiculares r → ( x, y , z ) = ( x0 , y0 , zo ) + λ ( v1 , v2 , v3 ) , λ ∈ℜ s → ( x, y , z ) = ( x1 , y1 , z1 ) + k ( u1 , u2 , u3 ) , k ∈ℜ Se as rectas são perpendiculares os vectores directores são r v ( v1 , v2 , v3 ) r perpendiculares u ( u1 , u2 , u3 ) r r v× =0 u ou seja: r v1u1 + v2u2 + v3u3 = 0 s Jorge Freitas ESAS 2006
- 5. Exemplo 1 r → ( x, y , z ) = ( −1, 0, 2 ) + λ ( 3, 2, −1) , λ ∈ℜ s → ( x, y, z ) = ( 1, 0, 0 ) + k ( 1, 0,3) , k ∈ℜ • São perpendiculares porque os vectores r r v ( 3, 2, −1) e u ( 1, 0,3) são perpendiculares r r u ×v = 0 ⇔ 3 × 1 + 2 × 0 + ( −1) × 3 = 0 Jorge Freitas ESAS 2006
- 6. Exemplo 2 r → ( x, y , z ) = ( −1, 0, 2 ) + λ ( 3, 2, −1) , λ ∈ℜ x −3 z −3 = s → 2 6 y = −3 • São perpendiculares porque os vectores r r v ( 3, 2, −1) e u ( 2, 0, −6 ) são perpendiculares r r u ×v = 0 ⇔ 3 × 2 + 2 × 0 + ( −1) × 6 = 0 Jorge Freitas ESAS 2006
- 7. Paralelismo e Perpendicularidade de Planos 1. Planos Paralelos α → ax + by + cz + d = 0 β → a ′x + b′y + c′z + d ′ = 0 r v (a, b, c) Se os planos são paralelos α os vectores perpendiculares aos planos são colineares r r r u (a′, b′, c′ ) v = ku ou seja: β a b c = = a ′ b′ c ′ Jorge Freitas ESAS 2006
- 8. Exemplo α → x − 3y + 2z − 7 = 0 β → −2 x + 6 y − 4 z + 5 = 0 • São paralelos porque os vectores r r v ( 1, −3, 2 ) e u ( −2, 6, −4 ) são colineares r r 1 −3 2 u = −2v ⇔ = = −2 6 −4 Jorge Freitas ESAS 2006
- 9. Paralelismo e Perpendicularidade de Planos 2. Planos Perpendiculares α → ax + by + cz + d = 0 β → a ′x + b′y + c′z + d ′ = 0 r Se os planos são perpendiculares u (a′, b′, c′ ) os vectores perpendiculares aos planos são perpendiculares entre si r v (a, b, c) rr v .u = 0 ou seja: α aa′ + bb′ + cc′ = 0 Jorge Freitas β ESAS 2006
- 10. Exemplo α → x − 3y + 2z − 7 = 0 β → −2 x − 2 y − z + 5 = 0 • Os planos são perpendiculares porque os vectores r r v ( 1, −3, 2 ) e u ( −2, −2, −1) são perpendiculares r r u ×v = 0 ⇔ 2 × ( −2 ) + ( −3) × ( −2 ) + 2 × ( −1) = 0 ⇔ r r u ×v = 0 ⇔ −4 + 6 − 2 = 0 Jorge Freitas ESAS 2006
- 11. Perpendicularidade de Rectas e Planos α → ax + by + cz + d = 0 x − x1 y − y1 z − z1 r → = = v1 v2 v3 Se a recta é perpendicular ao plano, é paralela ao vector r perpendicular ao plano v (v1 , v2 , v3 ) r r r r r u ( a , b, c ) v // u ou v = ku ou seja: v1 v2 v3 α = = a b c Jorge Freitas r ESAS 2006
- 12. Exemplo α → x − 3y + 2z − 7 = 0 r → ( x, y, z ) = ( −1, 0, 2 ) + λ ( 2, −6, 4 ) , λ ∈ℜ • A recta é perpendicular ao plano porque os vectores r r v ( 1, −3, 2 ) e u ( 2, −6, 4 ) são colineares (ou paralelos) r r 1 −3 2 u = 2v ⇔ = = 2 −6 4 Jorge Freitas ESAS 2006
- 13. Paralelismo de Rectas e Planos α → ax + by + cz + d = 0 x − x1 y − y1 z − z1 r → = = v1 v2 v3 Se a recta é paralela ao plano, é perpendicular ao vector r perpendicular ao plano v (v1 , v2 , v3 ) r r r r r u ( a , b, c ) v ⊥ u ou v × = 0 u ou seja: α aa′ + bb′ + cc′ = 0 EscolaJorge Freitas Secundária Alberto Sampaio Jorge Manuel 2006 ESAS Carneiro de Freitas Março 2006
- 14. Exemplo α → x − 3y + 2z − 7 = 0 r → ( x, y , z ) = ( −1, 0, 2 ) + λ ( 2, 2, 2 ) , λ ∈ℜ • A recta é paralela ao plano porque os vectores r r v ( 1, −3, 2 ) e u ( 2, 2, 2 ) são perpendiculares r r u ×v = 0 ⇔ 1× 2 + ( −3) × 2 + 2 × 2 = 0 ⇔ r r u ×v = 0 ⇔ 2 − 6 + 4 = 0 Jorge Freitas ESAS 2006
- 15. Intersecção de planos Jorge Freitas ESAS 2006
- 16. Posição relativa de 3 planos α → ax + by + cz + d = 0 β → a′x + b′y + c′z + d ′ = 0 γ → a′′x + b′′y + c′′z + d ′′ = 0 r w (a′ , b′ , c′ ) r v (a, b, c) γ r u (a′ , b′ , c′ ) α Jorge Freitas β ESAS 2006
- 17. A intersecção de três planos obtém-se resolvendo o sistema: ax + by + cz + d = 0 a ′x + b′y + c′z + d ′ = 0 a ′′x + b′′y + c′′z + d ′′ = 0 Jorge Freitas ESAS 2006
- 18. r r r v, u e w não são colineares Sistema possível e determinado. r w (a′ , b′ , c′ ) γ A A solução é r r v ( a , b, c ) (x0,y0,z0) u (a′, b′, c′ ) (coordenadas do ponto A) β α Jorge Freitas ESAS 2006
- 19. Os 3 planos intersectam-se num ponto. O sistema é possível e determinado. w ( a ′ , b′ , c ′ ) A solução é γ (x0,y0,z0) A (coordenadas u (a′, b′, c′ ) v (a, b, c) do ponto A) α β v, u e w não são colineares Jorge Freitas ESAS 2006
- 20. Exemplo x + 2 y − z + 6 = 0 3 x + y + z = 4 x − 3y − 2z = 1 • Os três planos intersectam-se num ponto. • O sistema tem solução x = 1 Resolver o sistema: y = −2 • na calculadora • método da substituição z = 3 • método da redução Jorge Freitas ESAS 2006
- 21. v, u e w Os três planos não são colineares intersectam-se segundo uma recta. r O sistema é possível e γ u ( a ′ , b′ , c ′ ) indeterminado. v ( a , b, c ) w ( a ′ , b′ , c ′ ) β As soluções são todos os pontos da recta r α Jorge Freitas ESAS 2006
- 22. Exemplo x + 2 y − 3z = −6 2 x − y − z = 3 x + y − 2 z = −3 • Os três planos intersectam-se numa recta. • O sistema é indeterminado z = x x−0 y +3 z −0 ⇔ x = y+3= z ⇔ = = z = y + 3 1 1 1 Jorge Freitas ESAS 2006
- 23. Dois dos planos são coincidentes. u // w O sistema é possível e indeterminado. γ w ( a ′ , b′ , c ′ ) r As soluções u (a′, b′, c′ ) β são as coordenadas v (a, b, c) de cada um dos pontos da recta r α Jorge Freitas ESAS 2006
- 24. Exemplo x + 2 y − 3z = −6 2 x + 4 y − 6 z = −12 x + y − 2 z = −3 • Dois dos planos são coincidentes • Os três planos intersectam-se numa recta. • O sistema é indeterminado z = x x−0 y +3 z −0 ⇔ x = y +3= z ⇔ = = z = y + 3 1 1 1 Jorge Freitas ESAS 2006
- 25. Os 3 planos são coincidentes v // u // w O sistema é indeterminado Qualquer ponto destes u (a′, b′, c′ ) planos é solução v ( a , b, c ) do sistema. β w ( a ′ , b′ , c ′ ) γ α Jorge Freitas ESAS 2006
- 26. Exemplo x + 2 y − 3z = −6 2 x + 4 y − 6 z = −12 − x − 2 y + 3 z = 6 • Os três planos são coincidentes • Qualquer ponto de um dos planos pertence também aos outros planos • O sistema é indeterminado Jorge Freitas ESAS 2006
- 27. v // u // w Os 3 planos são estritamente w (a′ , b′ , c′ ) paralelos γ Os planos u (a′, b′, c′ ) não se intersectam β O sistema é impossível Jorge Freitas ESAS 2006 v ( a , b, c ) α
- 28. Exemplo x + 2 y − 3 z = −6 x + 2 y − 3z = 0 x + 2 y − 3z = 5 • Os três planos estritamente paralelos • Os três planos nunca se interceptam • O sistema é impossível Jorge Freitas ESAS 2006
- 29. v // u Dois dos planos são estritamente γ paralelos w ( a ′ , b′ , c ′ ) u (a′, b′, c′ ) β Os 3 planos não se intersectam α v ( a , b, c ) O sistema é impossível Jorge Freitas ESAS 2006
- 30. Exemplo x + 2 y − 3 z = −6 − x − 2 y + 3 z = 0 2 x + y − 3 z = 2 • Dois dos planos são estritamente paralelos • O terceiro plano intersecta-os segundo rectas paralelas entre si − x + y = −8 y = x −8 ⇔ x − y = 2 y = x − 2 • O sistema é impossível Jorge Freitas ESAS 2006
- 31. v, u e w Os 3 planos não são colineares intersectam-se 2 a 2 segundo rectas estritamente paralelas u (a′, b′, c′ ) v ( a , b, c ) O sistema é impossível w ( a ′ , b′ , c ′ ) α γ β Jorge Freitas ESAS 2006
- 32. Exemplo x + y + z = 6 2 x − y = −1 3 x + z = 2 • Os três planos não são paralelos • Os planos intersetam-se dois a dois segundo rectas paralelas 3 y + 2 z = −11 3 y + 2 z = 16 • O sistema é impossível 3 y + 2 z = 7 Jorge Freitas ESAS 2006
- 33. F i m Jorge Freitas ESAS 2006