O documento apresenta um trabalho sobre motores de passo, descrevendo suas aplicações, funcionamento, estrutura interna e formas de controle, incluindo circuitos acionadores e integrados como o L297 e SLA7052.
Motores de Passo
"Trabalho apresentado em disciplina de Conversão de Energia II,
como parte dos requisitos necessários para aprovação na mesma ";
Alunos:
Creso Rosa de Souza Filho Prontuário: 106471-1
Henrique Vitkauskas Doria Prontuário: 106231-X
Professor orientador: Alberto Akio Shiga
São Paulo, Novembro de 2012
2.
O que são?
• Os Motores de Passo são elementos
eletro-mecânicos que contém
inversores que convertem pulsos
elétricos em movimentos mecânicos
que geram variações angulares
discretas. O rotor ou eixo de um
motor de passo é rotacionado em
pequenos incrementos angulares,
denominados “passos”, quando
pulsos elétricos são aplicados em
uma determinada seqüência nos
terminais deste.
3.
Aplicações
Um motor de passo tem uma grande
aplicação em movimentos precisos que
são necessários em alguns equipamentos.
Eles podem ser usados em aplicações
onde é necessário controlar vários
aspectos tais como:
• - Ângulo de rotação
• - Velocidade
• - Posição
• - Sincronismo
As principais vantagens dos motores de
passo são: Controle de seus movimentos
de forma precisa, controle da velocidade
em rotações horárias e anti-horárias,
torque preciso conforme a necessidade do
equipamento utilizado, dentre outras.
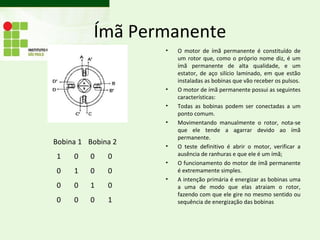
Ímã Permanente
• O motor de ímã permanente é constituído de
um rotor que, como o próprio nome diz, é um
ímã permanente de alta qualidade, e um
estator, de aço silício laminado, em que estão
instaladas as bobinas que vão receber os pulsos.
• O motor de ímã permanente possui as seguintes
características:
• Todas as bobinas podem ser conectadas a um
ponto comum.
• Movimentando manualmente o rotor, nota-se
que ele tende a agarrar devido ao ímã
permanente.
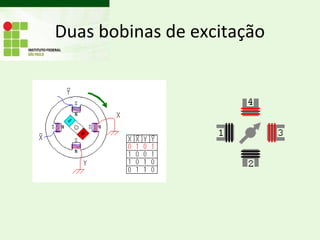
Bobina 1 Bobina 2 • O teste definitivo é abrir o motor, verificar a
1 0 0 0 ausência de ranhuras e que ele é um ímã;
• O funcionamento do motor de ímã permanente
0 1 0 0 é extremamente simples.
• A intenção primária é energizar as bobinas uma
0 0 1 0 a uma de modo que elas atraiam o rotor,
fazendo com que ele gire no mesmo sentido ou
0 0 0 1 sequência de energização das bobinas
11.
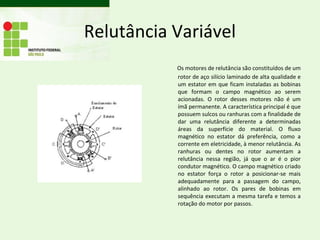
Relutância Variável
Os motores de relutância são constituídos de um
rotor de aço silício laminado de alta qualidade e
um estator em que ficam instaladas as bobinas
que formam o campo magnético ao serem
acionadas. O rotor desses motores não é um
ímã permanente. A característica principal é que
possuem sulcos ou ranhuras com a finalidade de
dar uma relutância diferente a determinadas
áreas da superfície do material. O fluxo
magnético no estator dá preferência, como a
corrente em eletricidade, à menor relutância. As
ranhuras ou dentes no rotor aumentam a
relutância nessa região, já que o ar é o pior
condutor magnético. O campo magnético criado
no estator força o rotor a posicionar-se mais
adequadamente para a passagem do campo,
alinhado ao rotor. Os pares de bobinas em
sequência executam a mesma tarefa e temos a
rotação do motor por passos.
12.
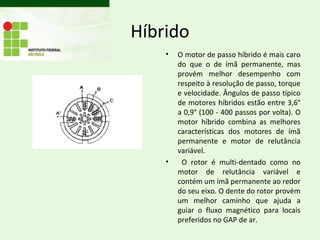
Híbrido
• O motor de passo híbrido é mais caro
do que o de ímã permanente, mas
provém melhor desempenho com
respeito à resolução de passo, torque
e velocidade. Ângulos de passo típico
de motores híbridos estão entre 3,6°
a 0,9° (100 - 400 passos por volta). O
motor híbrido combina as melhores
características dos motores de ímã
permanente e motor de relutância
variável.
• O rotor é multi-dentado como no
motor de relutância variável e
contém um ímã permanente ao redor
do seu eixo. O dente do rotor provém
um melhor caminho que ajuda a
guiar o fluxo magnético para locais
preferidos no GAP de ar.
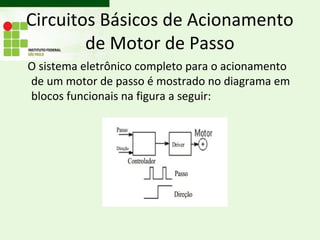
Circuitos Básicos deAcionamento
de Motor de Passo
O sistema eletrônico completo para o acionamento
de um motor de passo é mostrado no diagrama em
blocos funcionais na figura a seguir:
15.
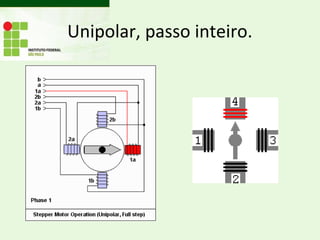
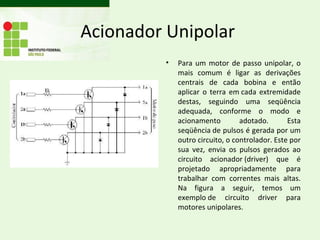
Acionador Unipolar
• Para um motor de passo unipolar, o
mais comum é ligar as derivações
centrais de cada bobina e então
aplicar o terra em cada extremidade
destas, seguindo uma seqüência
adequada, conforme o modo e
acionamento adotado. Esta
seqüência de pulsos é gerada por um
outro circuito, o controlador. Este por
sua vez, envia os pulsos gerados ao
circuito acionador (driver) que é
projetado apropriadamente para
trabalhar com correntes mais altas.
Na figura a seguir, temos um
exemplo de circuito driver para
motores unipolares.
16.
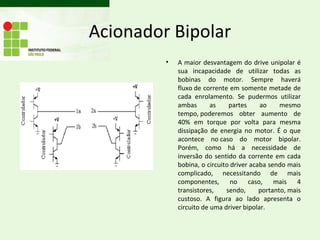
Acionador Bipolar
• A maior desvantagem do drive unipolar é
sua incapacidade de utilizar todas as
bobinas do motor. Sempre haverá
fluxo de corrente em somente metade de
cada enrolamento. Se pudermos utilizar
ambas as partes ao mesmo
tempo, poderemos obter aumento de
40% em torque por volta para mesma
dissipação de energia no motor. É o que
acontece no caso do motor bipolar.
Porém, como há a necessidade de
inversão do sentido da corrente em cada
bobina, o circuito driver acaba sendo mais
complicado, necessitando de mais
componentes, no caso, mais 4
transistores, sendo, portanto, mais
custoso. A figura ao lado apresenta o
circuito de uma driver bipolar.
17.
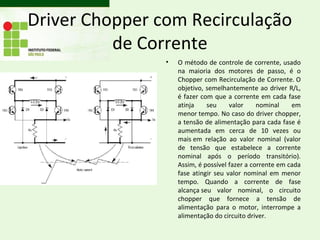
Driver Chopper comRecirculação
de Corrente
• O método de controle de corrente, usado
na maioria dos motores de passo, é o
Chopper com Recirculação de Corrente. O
objetivo, semelhantemente ao driver R/L,
é fazer com que a corrente em cada fase
atinja seu valor nominal em
menor tempo. No caso do driver chopper,
a tensão de alimentação para cada fase é
aumentada em cerca de 10 vezes ou
mais em relação ao valor nominal (valor
de tensão que estabelece a corrente
nominal após o período transitório).
Assim, é possível fazer a corrente em cada
fase atingir seu valor nominal em menor
tempo. Quando a corrente de fase
alcança seu valor nominal, o circuito
chopper que fornece a tensão de
alimentação para o motor, interrompe a
alimentação do circuito driver.
18.
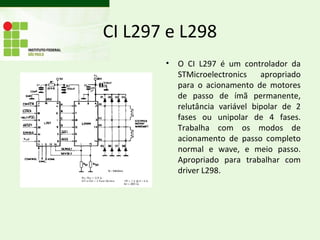
CI L297 eL298
• O CI L297 é um controlador da
STMicroelectronics apropriado
para o acionamento de motores
de passo de ímã permanente,
relutância variável bipolar de 2
fases ou unipolar de 4 fases.
Trabalha com os modos de
acionamento de passo completo
normal e wave, e meio passo.
Apropriado para trabalhar com
driver L298.
19.
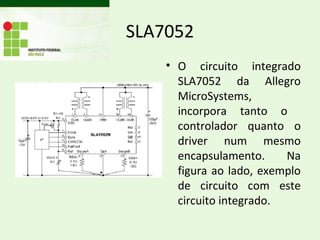
SLA7052
• O circuito integrado
SLA7052 da Allegro
MicroSystems,
incorpora tanto o
controlador quanto o
driver num mesmo
encapsulamento. Na
figura ao lado, exemplo
de circuito com este
circuito integrado.
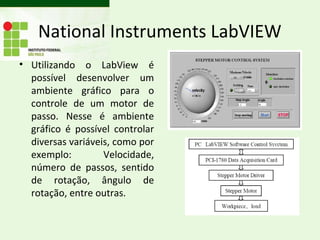
National Instruments LabVIEW
•Utilizando o LabView é
possível desenvolver um
ambiente gráfico para o
controle de um motor de
passo. Nesse é ambiente
gráfico é possível controlar
diversas variáveis, como por
exemplo: Velocidade,
número de passos, sentido
de rotação, ângulo de
rotação, entre outras.



![[Motores sincronos e assincronos]](https://cdn.slidesharecdn.com/ss_thumbnails/motoressincronoseassincronos-160602205614-thumbnail.jpg?width=640&height=640&fit=bounds)