Baixado 27 vezes




















![“Sempre que uma bobine é atravessada por um fluxo magnético variável,
gera-se uma f.e.m. induzida, que cria uma corrente induzida,
que tende a opor-se à causa que lhe deu origem”
Rotação do corpo A (que cria o campo magnético)
A
L
a
Bi 0
f variável, que atravessa a bobine L [f = B.S.cosa c/ a variável]
f.e.m.i 0
Ii 0 - a bobine L, é um fio com as extremidades curto circuitadas z
Lei de Lenz-Faraday:
Bi
Bi
i
d
fem N
dt
](https://image.slidesharecdn.com/mae-motorestrifasicosdeca-210510121652/75/motores-trifasicos-de-ca-26-2048.jpg)













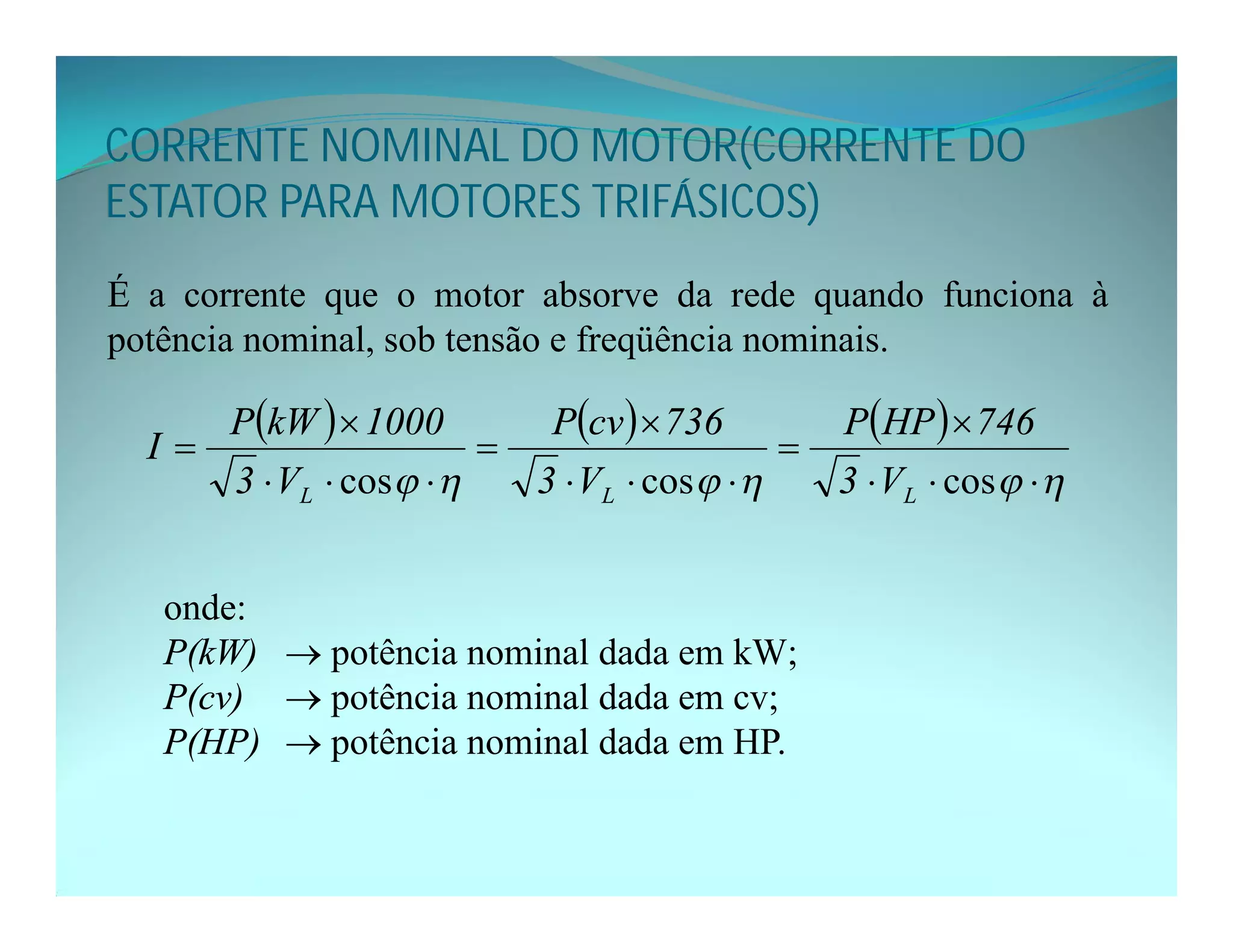





















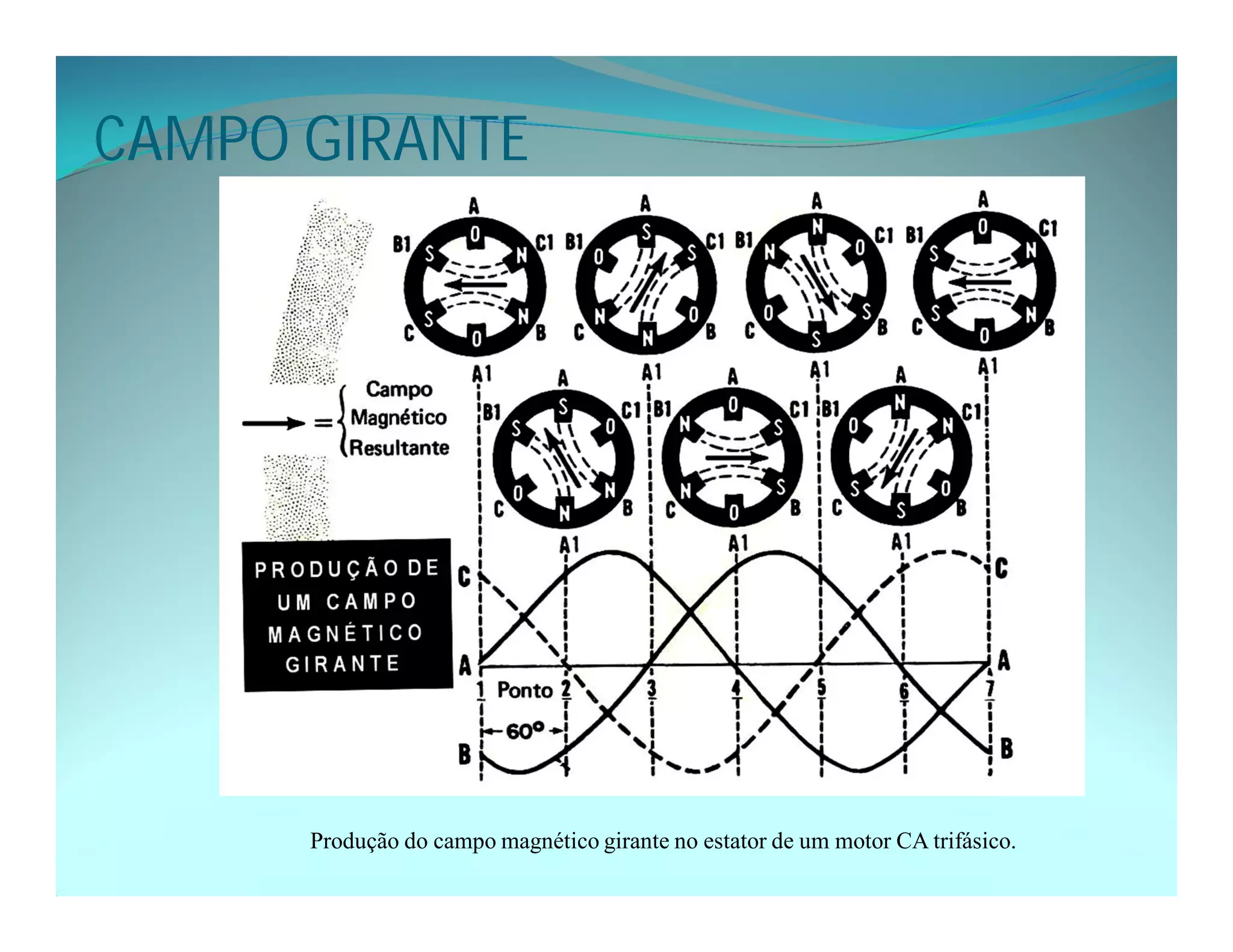
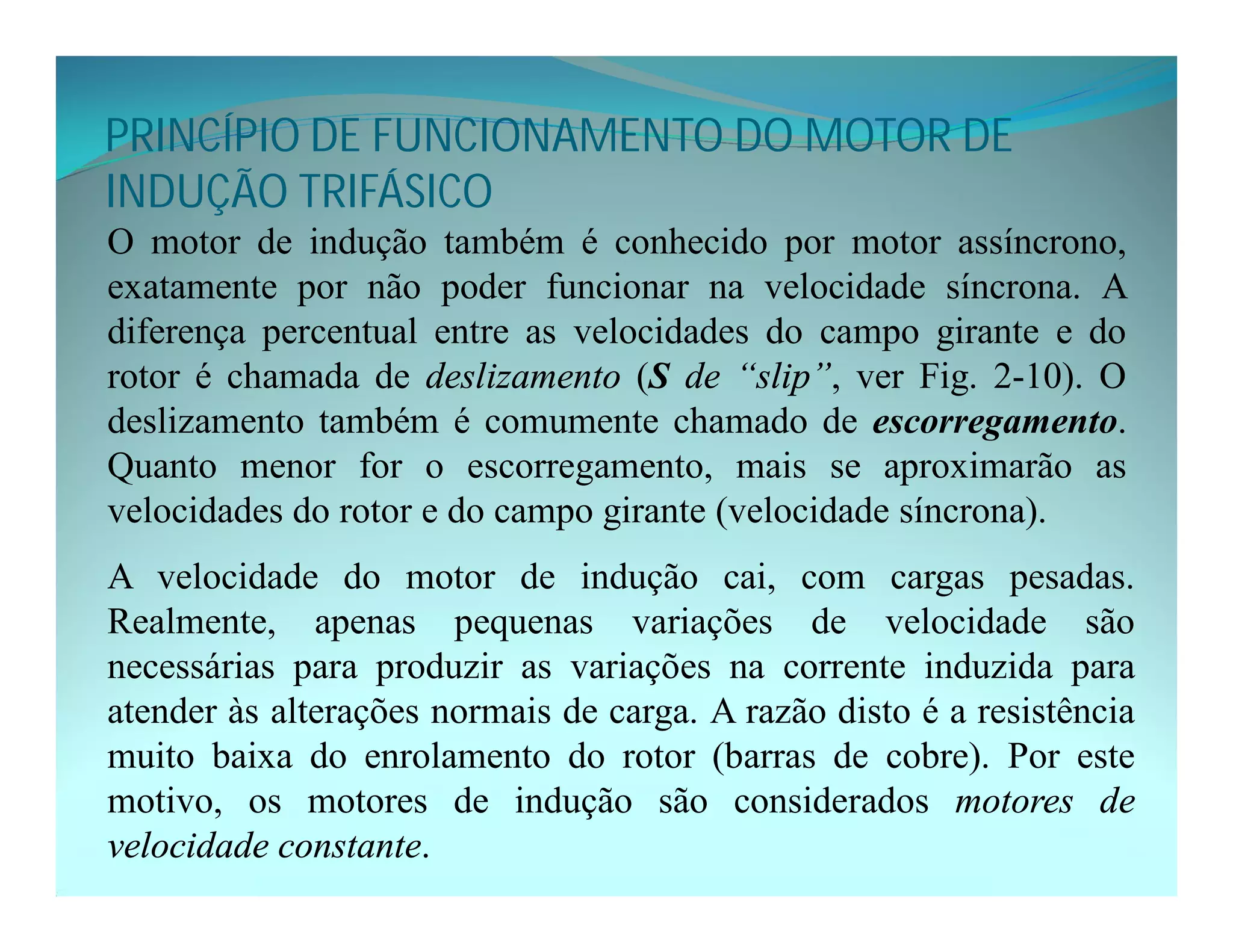
O documento aborda o funcionamento de motores trifásicos de corrente alternada (CA), descrevendo suas características e tipos, como motores de indução e síncronos. Os motores de indução são destacados por sua simplicidade e robustez, enquanto os motores síncronos garantem maior eficiência e controle de fator de potência. O texto também detalha o princípio de funcionamento, a relação entre a velocidade do rotor e do campo magnético, bem como a equação do torque e a potência nominal.







![[Motores sincronos e assincronos]](https://cdn.slidesharecdn.com/ss_thumbnails/motoressincronoseassincronos-160602205614-thumbnail.jpg?width=640&height=640&fit=bounds)














![[E-BOOK 1] - Comandos Elétricos 1.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/e-book1-comandoseltricos1-230731223144-ae158a59-thumbnail.jpg?width=640&height=640&fit=bounds)





































