Baixar para ler offline

![Robô Agua-viva
Imitando o animal, os pesquisadores esperam gastar menos energia das
baterias para movimentar o robô.
[Imagem: Amanda Loman/Virginia Tech]](https://image.slidesharecdn.com/robsbiomimticos-130514120436-phpapp01/85/Robos-biomimeticos-6-320.jpg)
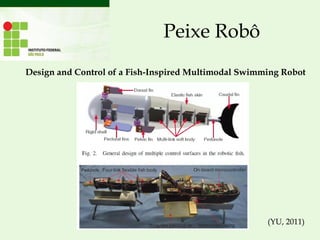
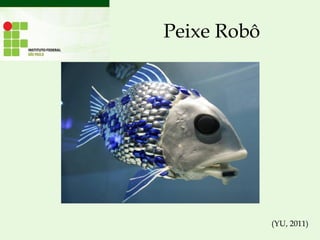
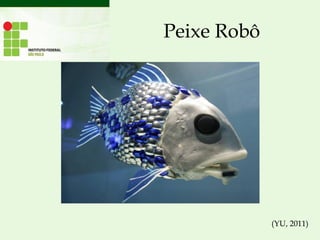

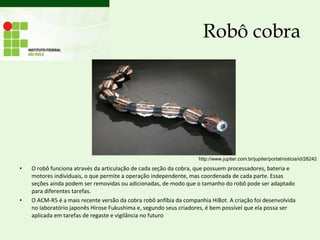
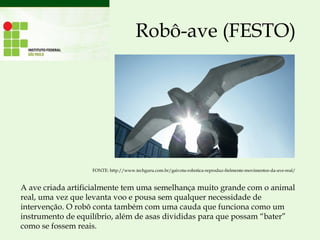
O documento descreve vários robôs biomiméticos, incluindo um robô cobra que pode ter suas seções removidas ou adicionadas, um inseto mecânico que está aprendendo a voar, um robô-ave criado pela Festo que pode voar e pousar sem intervenção, um robô água-viva que imita o movimento do animal para poupar energia, e um peixe robô projetado para nadar de forma semelhante a um peixe real.