O documento descreve as características principais das máquinas síncronas. Em 3 frases:
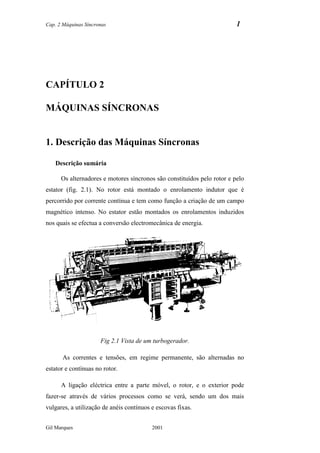
1) As máquinas síncronas consistem em um rotor com enrolamentos de excitação e um estator com enrolamentos induzidos, que convertem energia eletromecânica.
2) O rotor gera um campo magnético contínuo enquanto as correntes e tensões no estator são alternadas, e a ligação entre o rotor e o exterior pode ser feita através de anéis e escovas ou sistemas brushless.





























![Cap. 2 Máquinas Síncronas 31
Dos diagramas vectoriais das figuras 2.30 a 2.33 pode-se concluir que
a regulação de um gerador síncrono depende fundamentalmente de:
a) Do valor da reactância síncrona da máquina
b) Do factor de potência da carga.
Os mesmos diagramas vectoriais permitem concluir que a regulação é
um número positivo quando a carga é de natureza indutiva; esse número
diminuí à medida que o factor de potência se aproxima da unidade podendo
anular-se para um valor particular de factor de potência. Normalmente a
relação torna-se negativa para factores de potência capacitivos.
EXEMPLO 2.1
Um alternador trifásico tem as seguintes características
nominais:
SN = 20.6 MVA, cos ϕN = 0,9 (sobre-excitado), UN = 3,6 kV
IN=3304A, ifN = 514A, Icc/IN = 2.6 N=3600 rpm., p=1
O enrolamento de excitação é constituído por uma bobina
supercondutora. O valor do entreferro é de tal modo elevado
que a máquina funciona sempre em regime não saturado.
Os ensaios em vazio e em curto-circuito conduziram aos
gráficos da figura representada abaixo.
I cc
3304 A U 3600 V
IN 1
UN 1
161 A 430 A
I f [A] I f [A]
a) Calcule a reactância síncrona em Ohm e em pu.
b) Calcule o valor da corrente de excitação de modo a
que, com a tensão nominal aos terminais e a corrente nominal
nos enrolamentos do estator se tenha:
cosϕ=0.9 ind/ 1/ 0.9 cap
c) Com a corrente de excitação de 500A, calcule a tensão
aos terminais da máquina quando alimenta:
c.1) Uma carga constituída por 3 impedâncias de valor de
base unitário e factor de potência cosϕ=0,8 ind
c.2) Uma carga tal que a corrente no estator seja de
3000A com cosϕ=0,9 ind.
c.3) Determine o regime para o qual ∆U=0 quando a
corrente do induzido e do circuito de excitação forem iguais
aos valores nominais.
Resolução
Gil Marques 2001](https://image.slidesharecdn.com/mquinassncronas-120928213305-phpapp01/85/Maquinas-sincronas-31-320.jpg)


















![Cap. 2 Máquinas Síncronas 50
5. Máquina síncrona saturada. Diagrama de
Potier
Comportamento em regime saturado
A força electromotriz Ef pode ser calculada através da expressão 5.38,
sendo φ = φf. A força electromotriz E pode ser calculada pela mesma
expressão sendo φ o fluxo total (soma de φf+φi no caso de circuito
magnético linear), onde φf é o fluxo devido ao circuito de excitação e φi o
fluxo devido ao circuito do induzido
Uma vez que o circuito magnético não é linear, ver figura 2.45, e na
máquina síncrona o funcionamento é feito em zonas a que correspondem
estados de circuito magnético francamente saturados, a soma vectorial de φi
com φf não é aceitável.
20
18
16
Tensão composta [kV]
14
R (1005,13.2)
12
10
Icc [A]
8
6 6000
4 4000
2 2000
Ω (510,0)
0
0 200 400 600 800 1000 1200 1400 1600
Corrente de campo [A]
Fig. 2.45 Característica em vazio e curto-circuito de uma máquina síncrona
Em vez de se somarem os fluxos, deverão somar-se as forças
magnetomotrizes do induzido e do indutor. Como a distribuição de ambas as
Gil Marques 2001](https://image.slidesharecdn.com/mquinassncronas-120928213305-phpapp01/85/Maquinas-sincronas-50-320.jpg)











































![[Motores sincronos e assincronos]](https://cdn.slidesharecdn.com/ss_thumbnails/motoressincronoseassincronos-160602205614-thumbnail.jpg?width=640&height=640&fit=bounds)
































































