Baixado 23 vezes






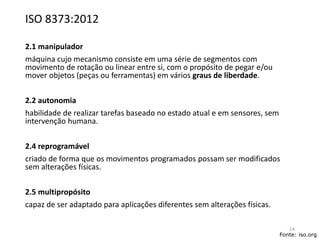
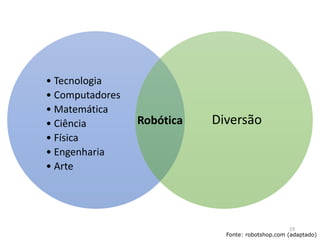



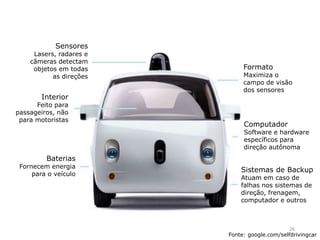














O documento apresenta uma introdução à robótica, definindo o que é um robô de acordo com a ISO 8373:2012 e discutindo as aplicações da robótica em veículos autônomos, exploração espacial e drones. Também aborda brevemente o mercado de trabalho em robótica e perfis profissionais comuns.













































![[José Ahirton Lopes e Rafael Arevalo] Aula 01 - Robótica e IOT](https://cdn.slidesharecdn.com/ss_thumbnails/aula1mbafiap2018roboticaeiot-190123132458-thumbnail.jpg?width=640&height=640&fit=bounds)

