Baixado 22 vezes

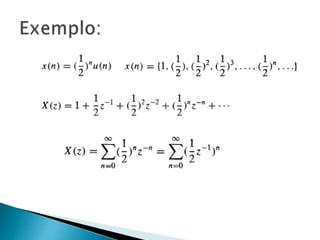
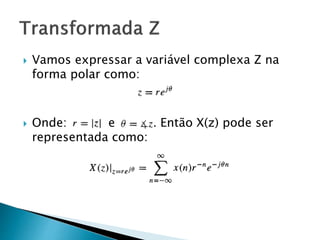
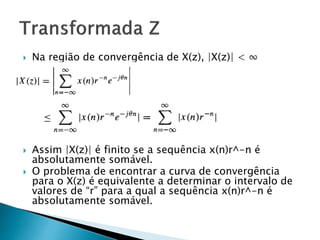
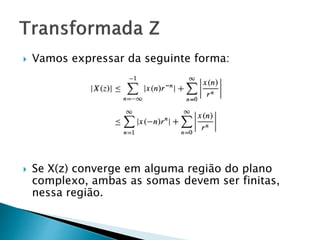
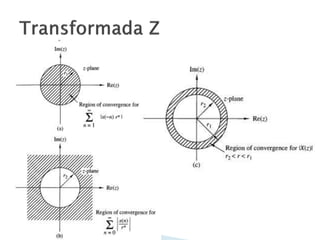
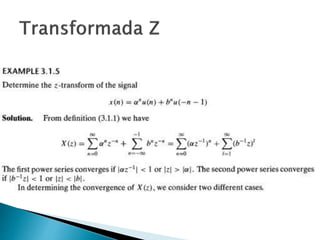
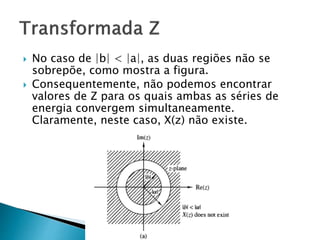
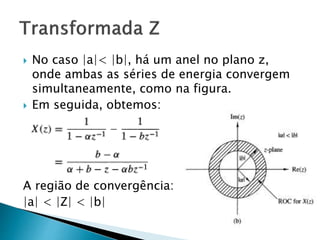
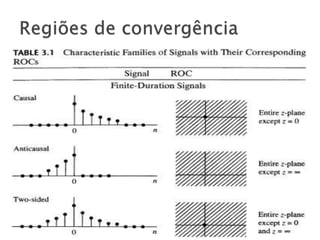
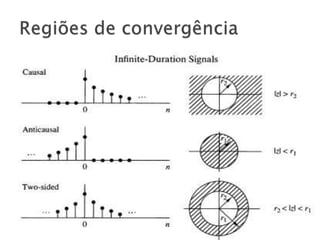

O documento discute a transformada Z, definindo-a como uma série de potências que transforma um sinal de tempo discreto do domínio do tempo para uma representação complexa. Explica que a região de convergência é onde a série converge a um valor finito e discute casos onde as regiões de convergência se sobrepõem ou não, determinando a existência da transformada Z.




















![[Pds] Transformada Z](https://cdn.slidesharecdn.com/ss_thumbnails/pdstransformadaz-180606032240-thumbnail.jpg?width=640&height=640&fit=bounds)