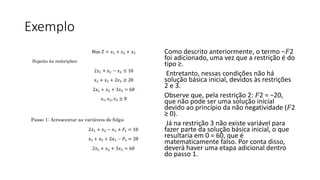
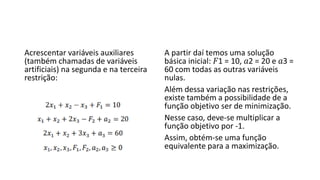
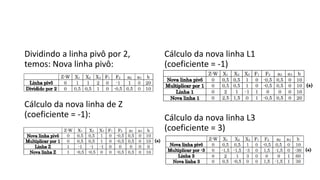
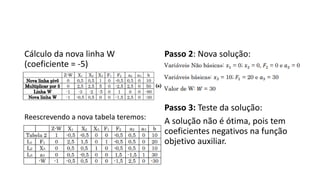
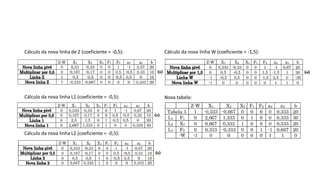
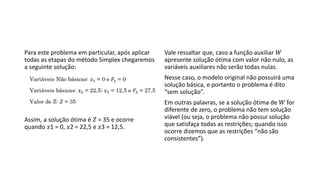
O documento descreve as variações no método simplex para lidar com diferentes tipos de restrições e funções objetivo, como: (1) adicionar variáveis auxiliares para restrições do tipo igualdade ou maior que; e (2) multiplicar a função objetivo por -1 para problemas de minimização. O método das duas fases é introduzido para resolver esses problemas, minimizando as variáveis auxiliares na primeira fase antes de resolver o problema original na segunda fase. Casos especiais como degeneração e soluções ótimas alternativas também são discutidos.