1) Cálculos vetoriais e decomposição de forças para aplicações em estática.
2) Conceitos de força resultante, equilíbrio e momento de força.
3) Condições de equilíbrio estático para corpos extensos sob a ação de forças.
SUMÁRIO
Cálculo vetorial paraaplicação em estática............................................................ 02
Decomposição de vetores................................................................................................ 03
Soma vetorial...................................................................................................................... 06
Força ..................................................................................................................................... 10
Força resultante................................................................................................................. 10
Leis de Newton................................................................................................................... 12
Tipos de Força.................................................................................................................... 13
Equilíbrio............................................................................................................................. 20
Equilíbrio de um ponto material................................................................................. 20
Equilíbrio de um corpo extenso................................................................................... 27
Momento de uma força................................................................................................... 28
Condições de equilíbrio de um corpo extenso........................................................ 30
3.
2
Cálculo Vetorial paraaplicação em Estática
Em Física, as grandezas podem ser classificadas de duas formas: grandezas
vetoriais e grandezas escalares. As grandezas vetoriais requerem um valor
numérico absoluto (módulo) acompanhado de sua orientação (direção e sentido)
e obedecem as definições matemáticas dos vetores. A direção indica se o vetor
está orientado horizontalmente, verticalmente ou inclinado com um ângulo a
partir de uma referência. Já o sentido especifica um pouco mais, isto é,
determina se o vetor está para a direita, para esquerda, para baixo ou para cima.
Também são utilizados como referência os pontos cardeais (norte, sul, leste,
oeste, nordeste, sudeste, noroeste e sudeste).
Exemplos:
1) Corpo em queda livre com velocidade de 10 m/s
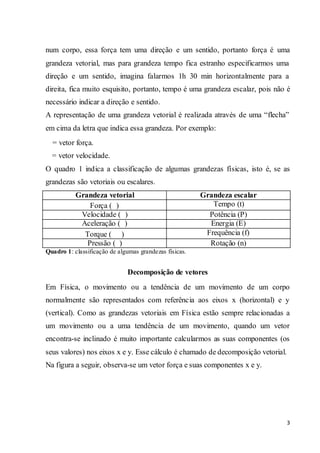
2) Carro se deslocando com velocidade de 20 m/s
3) Força de 50 N sendo aplicada numa caixa.
As grandezas que não tem necessidade de especificar sua orientação são
chamadas de grandezas escalares. Por exemplo, quando aplicamos uma força
Módulo: 10 m/s
Direção: vertical
Sentido: de cima para baixo ou de norte para sul.
Módulo: 20 m/s
Direção: horizontal
Sentido: da esquerda para direita ou de oeste para leste
Módulo: 50 N
Direção: inclinada à 30º da horizontal.
Sentido: para cima à 30º da horizontal ou de sudoeste
4.
3
num corpo, essaforça tem uma direção e um sentido, portanto força é uma
grandeza vetorial, mas para grandeza tempo fica estranho especificarmos uma
direção e um sentido, imagina falarmos 1h 30 min horizontalmente para a
direita, fica muito esquisito, portanto, tempo é uma grandeza escalar, pois não é
necessário indicar a direção e sentido.
A representação de uma grandeza vetorial é realizada através de uma “flecha”
em cima da letra que indica essa grandeza. Por exemplo:
= vetor força.
= vetor velocidade.
O quadro 1 indica a classificação de algumas grandezas físicas, isto é, se as
grandezas são vetoriais ou escalares.
Grandeza vetorial Grandeza escalar
Força ( ) Tempo (t)
Velocidade ( ) Potência (P)
Aceleração ( ) Energia (E)
Torque ( ) Frequência (f)
Pressão ( ) Rotação (n)
Quadro 1: classificação de algumas grandezas físicas.
Decomposição de vetores
Em Física, o movimento ou a tendência de um movimento de um corpo
normalmente são representados com referência aos eixos x (horizontal) e y
(vertical). Como as grandezas vetoriais em Física estão sempre relacionadas a
um movimento ou a uma tendência de um movimento, quando um vetor
encontra-se inclinado é muito importante calcularmos as suas componentes (os
seus valores) nos eixos x e y. Esse cálculo é chamado de decomposição vetorial.
Na figura a seguir, observa-se um vetor força e suas componentes x e y.
5.
4
Existem algumas relaçõesmatemáticas entre esses vetores, sendo que essas
relações são obtidas do triângulo retângulo formado no plano cartesiano:
Pelo Teorema de Pitágoras, temos:
Utilizando as relações trigonométricas seno e cosseno, obtemos:
Exemplos:
1) Um corpo é pendurado pelos cabos representados na figura a seguir.
Determine as componentes x e y da força no cabo 1, sabendo que o módulo
da força que atua nele é de 30 N.
6.
5
Resolução: Fazendo umplano cartesiano para o vetor F1, que está na direção
do cabo 1 da figura, temos:
2) Uma caixa se desloca horizontalmente conforme figura a seguir. Sabendo
que para vencer o atrito a componente x deve ser de 80 N no mínimo,
determine a força (F) que deve ser aplicado na corda.
Montando o plano cartesiano e destacando um triângulo retângulo, temos:
7.
6
Soma vetorial
Soma devetores é diferente da soma algébrica que estamos acostumados, pois
os vetores, além do módulo, possuem direção e sentido e essas características
devem ser levadas em consideração. A forma mais simples de se somar vetores é
através da representação geométrica dessa soma. A regra é bastante simples,
basta juntar os vetores mantendo suas direções e sentidos e não importando a
ordem. Após esse procedimento, cria-se um vetor do ponto final do último vetor
associado ao ponto inicial do primeiro vetor associado. Esse vetor é o vetor
soma. Nota-se que sempre será formado um polígono e por esse motivo o
método de resolução é chamado de regra do polígono.
Exemplos:
1) Determine geometricamente a soma dos vetores a, b e c que estão a seguir:
Resolução:
1º passo: juntar os vetores mantendo suas direções e sentidos e em qualquer
ordem.
8.
7
2º passo: Criarum vetor ligando o ponto final ao ponto inicial. Esse é o
resultado da soma vetorial.
Vetor soma
2) Somar os mesmos vetores, mas em ordem diferentes.
Existe outro método geométrico, chamado de regra do paralelogramo, que é
aplicado visando facilitar a resolução, mas ele só é utilizado quando a soma é
realizada com dois vetores.
A resolução é simples, basta juntar as origens dos dois vetores, traçar linhas
paralelas a ele e ligar a intersecção da origem dos vetores à intersecção das
linhas paralelas. Este segmento de reta é o vetor soma.
Exemplo: Somar os vetores a e b da figura a seguir.
1º passo: unir os vetores pela origem.
Vetor soma (ele é igual ao do primeiro
exemplo, provando que a ordem da soma não
interfere no resultado).
9.
8
2º passo: traçarlinhas paralelas aos vetores.
3º passo: ligar a origem à intersecção das linhas paralelas.
Observação: o método do paralelogramo é utilizado apenas na soma de dois
vetores, já o método do polígono pode ser utilizado para qualquer quantidade de
vetores.
Exemplo 2: Resolver o exercício anterior pelo método do polígono.
Percebe-se que o vetor soma é igual ao do
exercício anterior.
10.
9
Vale ressaltar quequando os vetores estão numa mesma direção a soma vetorial
é resolvida como uma soma ou uma subtração comum, se eles estiverem num
mesmo sentido é só somar seus valores e se estiverem em sentidos opostos é só
subtrair o maior do menor.
Exemplo: Sendo , e , determine o vetor soma nos casos
a seguir:
a)
Direção: horizontal;
Sentido: da esquerda para direita
b)
Resolução:
Direção: horizontal;
Sentido: da esquerda para direita
Soma
Vetor Soma
11.
10
Força
Força é umagente físico que tende a proporcionar aceleração ou desaceleração
no corpo que está sendo submetido a essa força.
A força pode ser de contato ou de campo. Força de contato, como o próprio
nome diz, tem que ocorrer um contato físico entre os corpos, já a de campo é
quando a força age à distância (força gravitacional, elétrica, magnética...).
A unidade de medida no sistema internacional de unidades de medidas (SI) de
qualquer força é o newton (N) em homenagem ao grande físico Isaac Newton.
Outras unidades de medida de força muito utilizadas são o quilograma força
(kgf), a libra (lb) e a dina (dyn), e as suas relações com o newton são:
1N 0,102 kgf.
1N = 0,2248 lb
1N dyn.
O quilograma força (kgf) é uma unidade muito utilizada na engenharia como
unidade da grandeza força e é definido como o peso de um corpo de 1kg de
massa sujeito a aceleração da gravidade média na superfície da Terra, a qual
possui um valor aproximado de 9,8 m/s2
. Assim:
1kgf = 9,8 N.
O Instrumento de medição utilizado para medir força é o dinamômetro.
Força resultante
É a soma vetorial dos vetores forças que estão atuando num sistema, isto é, seria
uma força que, sozinha, produziria o mesmo efeito no sistema que todas as
forças reunidas.
Exemplos:
a)
12.
11
b)
c)
d)
e) Quando temosmais de dois vetores, deve-se uni-los mantendo-se as suas
direções e sentidos, sendo a soma (força resultante) a distância da origem do
primeiro vetor à extremidade da seta do último vetor.
13.
12
Leis de Newton
Em1687 Isaac Newton publicou a sua grande obra Philosophiæ Naturalis
Principia Mathematica (Princípios Matemáticos da Filosofia Natural) onde,
entre outras coisas, estava o enunciado de suas três grandes leis sobre o
movimento dos corpos.
1ª Lei - Inércia: Todo corpo tende a manter o seu estado inicial de movimento a
não ser que uma força o obrigue a sair desse estado de movimento, isto é, um
corpo que está em repouso em relação a um referencial continuará em repouso
até uma força tirá-lo desse estado ou um corpo em movimento em relação a um
referencial só poderá mudar o seu movimento se uma força agir sobre ele.
Exemplos:
1. Freada de um veículo: quando um veículo freia o nosso corpo vai para
frente, pois ele tende a continuar o seu estado inicial de movimento
devido à inércia.
2. Aceleração de um veículo: quando um veículo acelera para sair da
condição de repouso, sentimos nosso corpo indo para trás, pois ele tende a
continuar no seu estado inicial que é o repouso.
2ª Lei - Princípio fundamental: a aceleração que um corpo adquire é
diretamente proporcional à força resultante e possui a mesma direção e o mesmo
sentido da força resultante, mas é inversamente proporcional à massa do corpo.
Matematicamente pode-se escrever:
=
Assim:
= m.
14.
13
Exemplo: Uma caixade 20kg é puxada por um cabo de aço com uma força de
200 N, conforme figura. Determine a aceleração adquirida, sabendo que a força
de atrito é de 120 N.
Resolução:
3ª Lei - Ação e Reação: A toda força de ação que age num corpo existe uma
força de reação deste corpo de mesma intensidade, mesma direção, mas de
sentido oposto. Esse par de forças (ação e reação) fica evidente quando uma
mola fica submetida a uma força F, conforme figura a seguir:
Quando se alonga ou comprime-se uma mola, ela reage com uma força de
sentido oposto, denominado força elástica (Fel), tentando retornar à sua posição
de repouso.
Tipos de força
A seguir serão apresentadas algumas forças que aparecem com muita frequência
no estudo de estática.
Força peso (W): É a força de atração gravitacional que um determinado corpo
está submetido. Todo corpo que possui massa, automaticamente possui força
peso, sendo ela diretamente proporcional a aceleração da gravidade local e
15.
14
apontada no sentidodo centro de massa do corpo celeste que o está atraindo, por
exemplo, um corpo de massa m sujeito a força gravitacional da Terra terá um
vetor força peso verticalmente para baixo (no sentido do centro da Terra) e
proporcional à aceleração da gravidade terrestre local, conforme figura a seguir.
A força resultante que age no corpo de massa m da figura é a força peso (W).
Como a aceleração proporcionada é a aceleração da gravidade (g) e sabendo que
a lei do princípio fundamental de Newton é dada por , teremos:
A aceleração da gravidade na superfície da Terra possui o valor médio de
9,8m/s2
, mas vale destacar que quanto mais distante do centro da Terra, menor o
valor da aceleração da gravidade, sendo que esse valor começa a ficar diferente
de 9,8 m/ a grandes altitudes (a partir de 22 km). Alguns valores da aceleração
da gravidade estão destacados na tabela 1, considerando o raio médio da Terra
de 6371 km e a massa de 5,97.1024
kg.
Altitude (km) Aceleração
gravitacional (m/s2
)
0 9,8
1 9,8
5 9,8
10 9,8
15 9,8
20 9,8
22 9,7
25 9,7
30 9,7
Tabela 1: Valores da aceleração da gravidade em função da altitude.
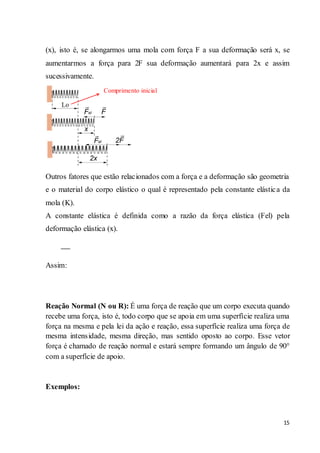
Força Elástica (Fel): É a força de reação que um corpo elástico executa quando
é alongado ou comprimido. A intensidade da força é proporcional à deformação
16.
15
(x), isto é,se alongarmos uma mola com força F a sua deformação será x, se
aumentarmos a força para 2F sua deformação aumentará para 2x e assim
sucessivamente.
Outros fatores que estão relacionados com a força e a deformação são geometria
e o material do corpo elástico o qual é representado pela constante elástica da
mola (K).
A constante elástica é definida como a razão da força elástica (Fel) pela
deformação elástica (x).
Assim:
Reação Normal (N ou R): É uma força de reação que um corpo executa quando
recebe uma força, isto é, todo corpo que se apoia em uma superfície realiza uma
força na mesma e pela lei da ação e reação, essa superfície realiza uma força de
mesma intensidade, mesma direção, mas sentido oposto ao corpo. Esse vetor
força é chamado de reação normal e estará sempre formando um ângulo de 90°
com a superfície de apoio.
Exemplos:
Comprimento inicial
17.
16
a)
b)
c)
Tração (T): Éum esforço mecânico que os corpos ficam submetidos quando
estão sujeitos a forças que tendem a alongá-los. É comumente aplicado em
cabos, cordas, correntes, fios, linhas e outros. Quando tracionamos um cabo, por
exemplo, toda a extensão dele estará tracionada com a mesma intensidade. A
representação da tração é realizada da seguinte maneira.
Corpo apoiado num plano horizontal:
R = W
Corpo apoiado num plano inclinado:
R = Wy
Viga apoiada em duas extremidades:
Força de atrito
18.
17
Note que ocorpo move-se devido à força de tração, mas ao mesmo tempo, a
força de atrito tenta frear o tambor, tracionando no sentido oposto, portanto, a
força de tração deve ser indicada nas duas extremidades do cabo e em sentidos
opostos.
Exemplos:
a) Corpo em repouso pendurado por um cabo de aço:
b)Dois corpos em repouso pendurados por cabos de aço:
c) Corpo em repouso pendurado por um sistema de cabos:
Tambor enrolando o cabo para
puxar a caixa
Para calcular as trações e , devem-se
utilizar algumas técnicas que
serão apresentadas no próximo capítulo.
19.
18
Exercícios Resolvidos
1) Determineo peso de um corpo que possui massa de 20 kg, sabendo que a
aceleração da gravidade é de 9,8 m/ .
Resolução:
W = m.g
W = 20.9,8
W = 196 N
2) Se o corpo do exercício anterior fosse para Lua, qual seria a sua massa e o
seu peso na superfície lunar sabendo que a aceleração da gravidade é de
1,6m/ ?
Resolução:
A massa não altera seu valor (m = 20 kg), pois massa é a quantidade de
matéria do corpo e na mudança de local essa propriedade do corpo não se
altera. Já o peso depende da aceleração da gravidade, assim:
W = m.g
W = 20.1,6
W = 32 N
3) Uma força de 200 N é aplicada sobre uma mola alongando-a conforme
figura. Sabendo que a mola possui constante elástica K = 1000 N/m,
determine a sua deformação elástica.
Resolução:
A força F aplicada na mola fará surgir uma força elástica no sentido
contrário de mesma intensidade (200N), assim:
20.
19
Fel = K.x
200= 1000.x
x= 0,2m
4) A placa superior de um estampo de corte possui massa de 40 kg e está sob
uma mola de constante elástica K = 7200 N/m. Determine quanto a mola
deforma.
Resolução:
Primeiro deve-se calcular a força peso da base superior do estampo:
W = m.g
W = 40.9,8
W = 392 N
A força elástica possui a mesma intensidade da força peso (392 N), porém
de sentido aposto, assim:
Fel = K.x
392 = 7200.x
x = 0,054 m
21.
20
Equilíbrio
Para um corpoadquirir a condição de equilíbrio em relação a um referencial ele
deve se encontrar em repouso (equilíbrio estático) ou em movimento retilíneo e
uniforme, isto é, com velocidade linear constante (equilíbrio dinâmico).
Em ambos os casos podemos dizer que a somatória das forças que atuam no
corpo é nula, pois a aceleração será nula nas duas situações.
Exemplos:
Equilíbrio de um ponto material
O estudo de equilíbrio é realizado em corpos considerados como ponto material
e corpos considerados como corpo extenso.
Um ponto material é um corpo que possui dimensões desprezíveis para aquele
determinado estudo e a única preocupação é verificar a condição de equilíbrio na
translação retilínea (movimento retilíneo).
Os cálculos relacionados ao equilíbrio de um ponto material devem obedecer as
seguintes condições:
A força resultante na vertical (eixo y) é dada por:
;
Como o corpo está em equilíbrio, a aceleração será nula, assim:
.
Carro em movimento retilíneo uniforme na horizontal, isto é,
sua aceleração horizontal é nula, assim:
, então, .
O carro não possui movimento vertical, portanto sua aceleração
vertical é nula, assim:
, então, .
22.
21
1ª)
2ª)
Exercícios resolvidos
1) Calculea tração que o cabo da figura está submetido para suportar um
pacote de 100 kg.
Resolução:
1º passo: Indicar as forças que atuam no pacote (diagrama de força):
2º passo: Aplicar as condições de equilíbrio:
As forças que estão agindo no pacote são verticais, assim:
Como temos vetores força em sentidos opostos, a resultante ( ) tem que
ser a subtração deles, portanto:
T – W = 0
T = W (este resultado é óbvio, pois para obter o equilíbrio, as duas forças
devem ter o mesmo valor). Como W = m.g, então:
T = m.g
T = 100.9,8
T = 980 N
23.
22
2) Calcule adeformação elástica das molas de um carro de 1200 kg que se
encontra parado, sabendo que a constante elástica de cada mola é de
15000N/m.
Resolução:
Um carro é composto por quatro molas, assim, o diagrama de forças fica:
Portanto,
4.Fel – W= 0
4.Fel = W
Como Fel=Kx e W=mg, então:
4.K.x = m.g
4.15000.x = 1200.9,8
60000.x = 11760
x = 0,196 m = 19,6 cm
3) Na figura a seguir está representado um engradado de 150 kg suspenso pelos
cabos 1, 2 e 3. Qual o valor das trações que estes cabos estão submetidos?
Resolução:
1º passo: Montar o diagrama de forças do sistema:
24.
23
Diagrama de forçasque atuam no engradado
Nesse diagrama pode-se perceber que para o engradado estar em equilíbrio,
a força de tração (T1) deve ser igual a força peso (W).
Diagrama de forças que atuam entre os cabos
Nesse diagrama, como a tração T3 está inclinada, deve-se utilizar alguma
técnica matemática para calcular as trações não conhecidas, sabendo-se que
T1 =1470N.
2º passo: Escolher o método de resolução adequado: Existem dois métodos
possíveis de resolução, o da triangulação e o da decomposição vetorial:
Método da triangulação:
Para o corpo estar em equilíbrio a soma dos vetores deve ser nula, assim se
juntarmos os vetores, o ponto inicial do primeiro vetor coincide com a seta
do último vetor formando um triângulo:
25.
24
Como T1=1470N então,por trigonometria:
Assim, como agora temos os valores de T1 e de T3, para calcular T2 pode ser
utilizando o teorema de Pitágoras ou trigonometria:
Método da decomposição vetorial:
Neste método, deve-se fazer a decomposição do vetor que está inclinado (no
caso o T3) e, como o sistema está em equilíbrio, a componente T3x deve ser
igual a T2 e a componente T3y deve ser igual a T1, portanto:
Da figura podemos extrair o seguinte triângulo:
0 1
2
1
2 0
2
40
40
1751,88
T
tg
T
T
T
tg
T N
3 1
3
1470
y
y
T T W
T N
26.
25
E a resoluçãoé igual ao do método da triangulação, assim, por
trigonometria:
Como agora temos os valores de T3 e de T3y, para calcular T3x pode ser
utilizando o teorema de Pitágoras ou trigonometria:
Como T2=T3x, então:
A pergunta que fica é: “Qual o melhor método?”. Bom isso depende da
aplicação, na situação do exemplo anterior, onde temos três vetores força e
um deles está inclinado, tanto faz o método, pois a resolução fica bem
parecida, mas quando temos dois vetores inclinados, o método da
triangulação é o mais simples, pois será resolvido apenas com a resolução
dos valores de cada vetor que forma o triângulo, enquanto que pelo método
da decomposição deve-se decompor os dois vetores inclinados. Agora,
quando temos mais de três vetores, o método da triangulação fica
impossível, pois não formará um triângulo e nesse caso deve-se aplicar o
método da decomposição.
30
3
3
3 0
3
40
40
1751,88
y
x
y
x
x
T
tg
T
T
T
tg
T N
2
1751,88T N
27.
26
4) Determine aforça que é aplicada na mola, de constante elástica
k=12000N/m, da figura a seguir e também o quanto ela está alongada,
sabendo que a carga que está suspensa é de 180 kg.
Resolução:
1º passo: Montar o diagrama de forças do sistema:
Diagrama de forças que atuam na carga
Nesse diagrama pode-se perceber que para a carga estar em equilíbrio, a
força de tração (T1) deve ser igual a força peso (W).
Diagrama de forças que atuam entre os cabos
28.
27
Lembre-se que Felrepresenta a força elástica, isto é, a força que a mola está
submetida.
2º passo: Escolher o método de resolução:
O método que será utilizado nessa resolução é o da triangulação. Para o
corpo estar em equilíbrio a soma dos vetores deve ser nula, assim se
juntarmos os vetores, o ponto inicial do primeiro vetor deve coincidir com a
seta do último vetor formando um triângulo:
Como T1=1764 N então, por trigonometria:
Com isso, já calculamos a força que está atuando na mola. Agora falta
determinar o quanto a mola está alongada, e para isso basta utilizar a
seguinte equação:
Equilíbrio de um corpo Extenso
No equilíbrio de um corpo extenso, além de analisar a condição de equilíbrio
para o movimento retilíneo (translação retilínea), devemos também analisar o
equilíbrio na rotação que é definido através da grandeza momento de uma força
ou momento torçor ou simplesmente torque.
0 1
0
20
1764
20
4846,55
el
el
el
T
tg
F
F
tg
F N
.
4846,55 12000.
0,4
el
F k x
x
x m
29.
28
Momento de umaForça
É a capacidade que uma força possui de rotacionar um determinado corpo.
Matematicamente é definido como o produto da intensidade de uma força pela
distância dessa força ao eixo de rotação, sendo que esse vetor força deve estar
perpendicular a uma linha que passe pelo eixo de rotação. Como o corpo pode
rotacionar nos sentidos horário e anti-horário, deve-se fazer uma distinção entre
eles, é usual considerar positivo quando o corpo tende a rotacionar no sentido
horário e negativo quando tende a rotacionar no sentido anti-horário, mas se
utilizar o inverso não terá problema o importante é fazer a distinção entre os
sentidos de rotação. Assim:
Exemplos: Determine o momento das forças nas situações indicadas nas figuras
a seguir:
1) Considere F1=80 N:
2) Considere F1=80 N:
3) Considere F1=100 N:
1
.
80.0,5
40
M F d
M
M Nm
1
.
80.0,5
40
M F d
M
M Nm
0M
O momento neste caso é nulo,
pois da forma que esta força está
sendo aplicada, a chave não terá
a capacidade de rotação.
Negativo porque a chave tende a
rotacionar no sentido anti-horário.
30.
29
4) Considere F1=120000N:
5) Considere F1=150 N, F2=100 N e F3=200 N:
6) Considere F = 500 N:
Neste caso temos que lembrar que o vetor força deve ser perpendicular à
distância até uma linha que passa pelo centro de rotação, assim, para facilitar
o cálculo, podemos decompor o vetor F na sua componente no eixo y e
utilizar a distância horizontal até o eixo de rotação (50 cm ou 0,5 m):
O valor de Fy é dado por:
Assim o momento dessa força será:
0M
O momento neste caso também
é nulo, pois da forma que esta
força está sendo aplicada, a
chave não terá a capacidade de
rotação.
1 2 3
1 2 3
.0,5 .0,2 .0,3
150.0,5 100.0,2 200.0,3
95 60
35
F F F
M M M M
M F F F
M
M
M Nm
0
0
0
cos30
.cos30
500.cos30
433,01
y
y
y
y
F
F
F F
F
F N
31.
30
Condições de equilíbriode um corpo extenso
Um corpo extenso para estar em equilíbrio deve obedecer as seguintes
condições:
1ª)
2ª)
3ª)
Lembre-se que o equilíbrio pode ser estático (repouso) ou dinâmico (movimento
retilíneo uniforme).
Estes conceitos são muito importantes para se projetar um mecanismo, pois é
necessário analisar os esforços que alguns pontos estratégicos do projeto estão
sujeitos para poder dimensioná-los.
Exercícios Resolvidos
1) Na figura a seguir a viga horizontal, homogênea e de massa 50 kg está presa
nas duas colunas por meio de parafusos dispostos nas duas extremidades.
Qual o esforço que cada parafuso está submetido?
Resolução:
1º passo: indicar as forças que estão atuando no sistema:
.
433,01.0,5
216,51
F y
F
F
M F d
M
M N
32.
31
Observa-se que aforça peso (W) está indicada no centro da viga, pois é no
centro de massa (ponto de equilíbrio) que podemos representar a força peso
de qualquer corpo, assim, fica indicado que todo peso do corpo está
concentrado no centro de massa, que neste caso é o centro geométrico.
O esforço que cada parafuso está submetido são as reações RA e RB, que
nada mais são do que as forças verticais que os parafusos devem fazer para
sustentar a força peso.
Percebe-se que nesse caso a força peso é distribuída igualmente para os
parafusos, assim:
2º passo: calcular a força peso:
3º passo: aplicar as condições de equilíbrio até conseguir calcular as
reações:
1ª)
Esta condição está atendida, pois não existem forças horizontais neste
sistema.
2ª)
Para aplicar esta condição será adotado que as forças para cima serão
negativas e a forças para baixo positivas, assim:
0A B
W R R
Como RA=RB, então:
50.9,8
490
W mg
W
W N
33.
32
0
490 2 0
4902
245
,
245
A B
A
A
A
A B
W R R
R
R
R N
Assim
R R N
Nota-se que neste exemplo era só dividir o peso por dois que teríamos
encontrado o esforço em cada parafuso, mas foi apresentada a técnica de
resolução através das condições de equilíbrio para provar que se chega ao
mesmo resultado e também para já ir se acostumando com essa técnica que
será a utilizada para se resolver questões mais complexas.
2) Colocando-se uma carga homogênea de 20 kg a 1m do apoio da esquerda do
exemplo anterior, conforme figura a seguir, qual será a nova força que cada
parafuso estará sujeito?
Resolução:
1º passo: indicar as forças que estão atuando no sistema:
34.
33
Nesse caso temosduas forças peso, uma da viga horizontal e a outra da
carga que está em cima da viga. Como a carga não está centralizada, então
os esforços que os parafusos estão submetidos são diferentes, isto é, as suas
reações RA e RB são diferentes.
2º passo: calcular as forças peso:
3º passo: aplicar as condições de equilíbrio até conseguir calcular as
reações:
1ª)
Esta condição está atendida, pois não existem forças horizontais neste
sistema.
2ª)
Para aplicar esta condição será adotado que as forças para cima serão
negativas e a forças para baixo positivas, assim:
1 2
0
196 490 0
686
A B
A B
A B
W W R R
R R
R R
Não é possível resolver essa equação, pois existem duas incógnitas, assim,
teremos que partir para a terceira condição de equilíbrio:
3ª)
Observação: Lembre-se que momento é o produto da força pela distância
até um eixo de rotação e que o momento é positivo para rotação tendendo
ao sentido horário e negativo para rotação tendendo ao sentido anti-horário.
Nesse caso será adotado como eixo de rotação o parafuso da esquerda, pois
assim eliminaremos a incógnita RA durante o cálculo por possuir distância
zero, portanto:
1 1
1
1
20.9,8
196
W m g
W
W N
2 2
2
2
50.9,8
490
W m g
W
W N
35.
34
1 2
0
196.1 490.1,5.0 .3 0
196 735 .3 0
931 .3
310,33
W W R RA B
A B
B
B
B
M M M M
R R
R
R
R N
Para determinar RA é só voltar na segunda condição de equilíbrio e resolver
a equação, assim:
686
310,33 686
375,67
A B
A
A
R R
R
R N
Observe que, por a carga está mais próxima do parafuso da esquerda, ele
terá que suportar uma força maior que o da direita.
3) Na figura abaixo encontra-se uma caixa de 600N sobre uma viga horizontal
homogênea de 200 N mantidos em equilíbrio por um cabo de aço na
extremidade direita e um pino na extremidade esquerda. Determine a tração
exercida no cabo e a força que o pino está submetido.
Resolução:
1º passo: indicar as forças que estão atuando no sistema:
36.
35
Nesse caso temosduas forças peso, uma da viga horizontal e a outra da
carga que está em cima da viga, uma força de tração no cabo de aço e uma
força de reação no pino devido à ação das forças peso.
Não é necessário calcular as forças peso, pois os valores já foram
determinados no enunciado do exercício.
2º passo: aplicar as condições de equilíbrio:
1ª)
Esta condição está atendida, pois não existem forças horizontais neste
sistema.
2ª)
Para aplicar esta condição será adotado que as forças para cima serão
negativas e as forças para baixo positivas, assim:
1 2
0
200 600 0
800
W W T R
T R
T R
Não é possível resolver essa equação, pois existem duas incógnitas, assim,
teremos que partir para a terceira condição de equilíbrio:
3ª)
Observação: Nesse caso será adotado como eixo de rotação o eixo que
está à esquerda, pois assim eliminaremos a incógnita R durante o cálculo
por possuir distância zero, portanto:
37.
36
1 2
0
200.2,5 600.3.5 .0 0
500 1800 .5 0
2300 .5
460
W W T R
M M M M
T R
T
T
T N
Para determinar R é só voltar na segunda condição de equilíbrio e resolver
a equação, assim:
800
460 800
340
T R
R
R N
4) Na figura abaixo encontra-se uma caixa de 600N sobre uma viga horizontal
homogênea de 200 N mantidos em equilíbrio por um cabo de aço na
extremidade direita e um pino na extremidade esquerda. Determine a tração
exercida no cabo e a força que o pino está submetido.
Resolução:
Este exercício é muito parecido com o anterior, a única diferença é que o
cabo de aço encontra-se inclinado, assim, a resolução torna-se também
muito parecida.
1º passo: indicar as forças que estão atuando no sistema:
38.
37
2º passo: aplicaras condições de equilíbrio:
1ª)
Neste caso, existem forças horizontais e para determinar a reação R, é
imprescindível calcular as suas componentes. Como as forças estão em
sentidos opostos, serão consideradas como positivas as forças que estão
apontadas para direita e negativas as forças que estão para a esquerda.
Portanto:
0x x
x x
R T
R T
Neste caso pode-se considerar também que, para estar em equilíbrio, as
forças que estão para direita devem ter a mesma intensidade das forças que
estão para esquerda, isto é:
x x
R T
2ª)
Para aplicar esta condição será adotado que as forças para cima serão
negativas e a forças para baixo positivas, assim:
1 2
0
200 600 0
800
y y
y y
y y
W W T R
T R
T R
Não é possível resolver essa equação, pois existem duas incógnitas, assim,
teremos que partir para a terceira condição de equilíbrio:
39.
38
3ª)
Observação: Nesse casoserá adotado como eixo de rotação o eixo que está
à esquerda, pois assim eliminaremos a incógnita Ry durante o cálculo por
possuir distância zero, portanto:
1 2
0
200.2,5 600.3 .5 .0 0
500 1800 .5 0
2300 .5
460
W W T Ry y
y y
y
y
y
M M M M
T R
T
T
T N
Para determinar Ry é só voltar na segunda condição de equilíbrio e resolver
a equação, assim:
800
460 800
340
y y
y
y
T R
R
R N
Para determinar o valor da tração do cabo (T) e sua componente Tx, deve-se
utilizar o triângulo formado entre T, Tx e Ty, assim:
Percebe-se que a tração no cabo é maior quando ele está inclinado do que
quando ele está na vertical (caso do exercício anterior), pois com ele
inclinado origina-se um força horizontal no sistema.
Para determinar Rx é só voltar na primeira condição de equilíbrio, assim:
548,21
x x
x
R T
R N
0
0
0
40
40
460
40
548,21
y
x
y
x
x
x
T
tg
T
T
T
tg
T
tg
T N
0
0
0
40
40
460
40
715,63
y
y
T
sen
T
T
T
sen
T
sen
T N
40.
39
E para terminar,basta calcular a reação no pino (R) através do teorema de
Pitágoras:
2 2 2
2 2 2548,21 340
645,08
x y
R R R
R
R N
41.
40
Referências Bibliográficas
RAMALHO, F.;CARDOSO, J; FERRARO, N & TOLEDO, P. Os Fundamentos da Física, 1. Moderna, São Paulo,
2000.
DOCA, R. H.; BISCUOLA, G. J.&VILLAS,N. Tópicos de Física, 1. Saraiva, São Paulo, 2001.
RESNICK, R.;HALLIDAY,D. &KRANE,K.Física 1. LTC, EUA, 2003.
MELCONIAN,S. Mecânica Técnica e Resistência dos Materiais. Érica. São Paulo, 1999.