Baixado 293 vezes
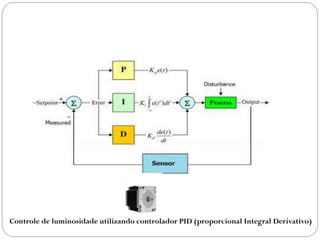

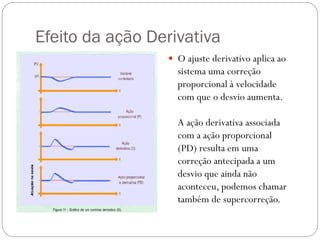
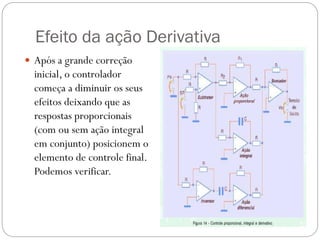
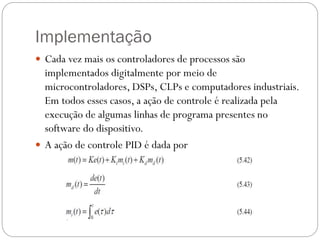
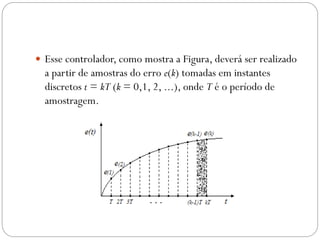
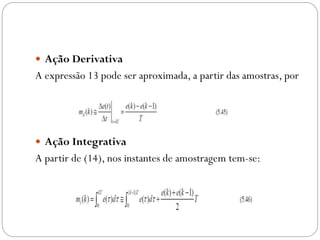
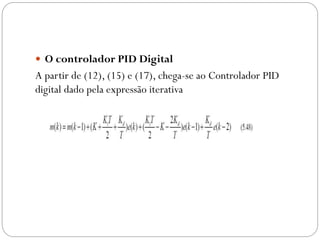
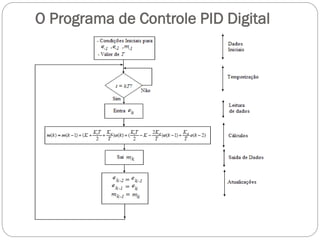
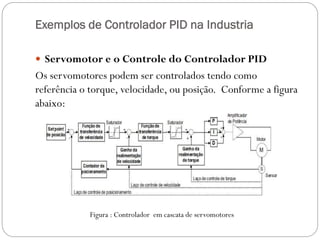

O documento descreve o funcionamento de controladores PID, incluindo suas ações proporcional, integral e derivativa. É explicado que o PID combina essas ações para minimizar o erro de processo de forma antecipada e precisa. Exemplos de aplicação de controladores PID em servomotores e outros sistemas industriais são apresentados.



































































