Baixado 49 vezes
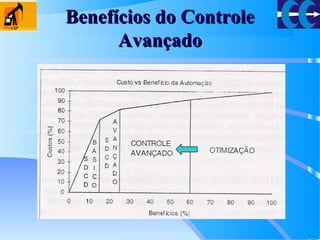
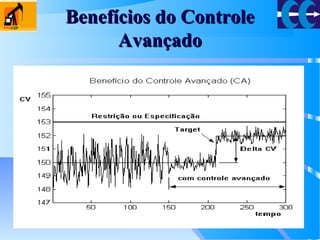
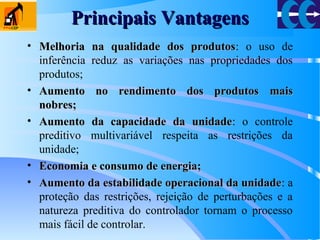

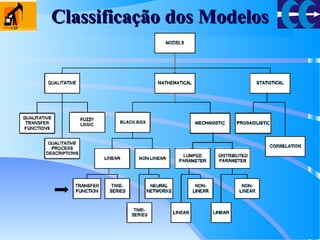




1) O documento discute vários tópicos relacionados a controle avançado, incluindo introdução, modelos de processo, tipos de controladores e aplicações. 2) É apresentada uma lista de técnicas de controle avançado como controle preditivo, multivariável, robusto e adaptativo. 3) Implementar controle avançado requer identificar o processo, revisar malhas regulatórias existentes e implementar um controlador preditivo multivariável.























































































