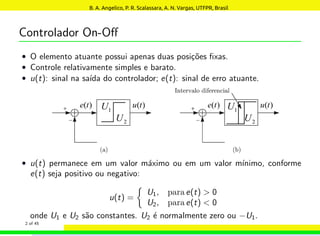
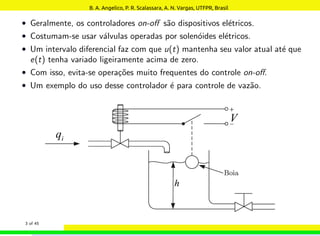
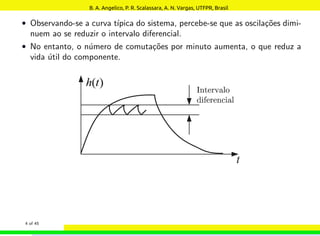
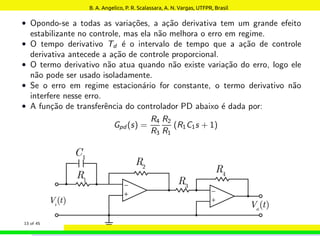
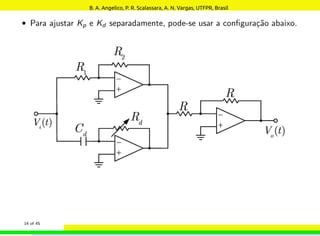
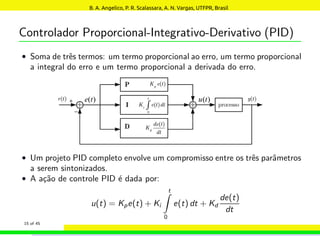
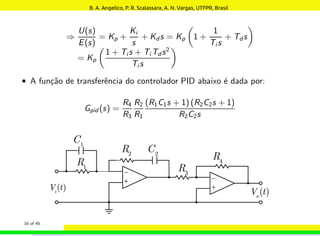
O documento descreve os principais tipos de controladores clássicos, incluindo controladores de duas posições, proporcionais, integrais, proporcional-integrais, proporcional-derivativos e proporcional-integral-derivativos. Além disso, explica brevemente os controladores on-off, proporcionais, integrais, proporcional-integrativo, proporcional-derivativo e proporcional-integral-derivativo.