Baixado 47 vezes








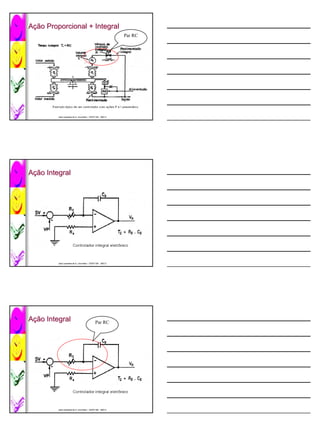

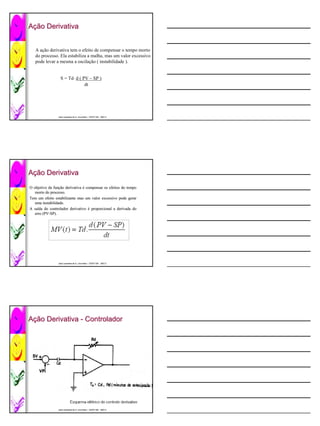





O documento discute as ações de controle PID. Descreve que a ação proporcional produz uma correção proporcional ao erro, a ação integral elimina o erro ao longo do tempo e a ação derivativa compensa o tempo morto do processo para estabilizar o sistema. Também explica como essas ações podem ser combinadas em um controlador PID para melhor controlar processos industriais.







































