Baixado 256 vezes

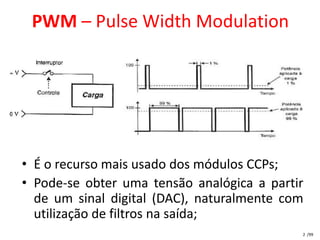
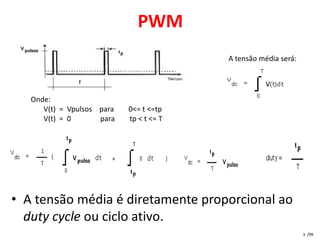
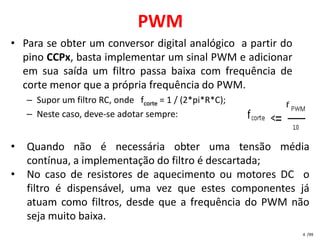
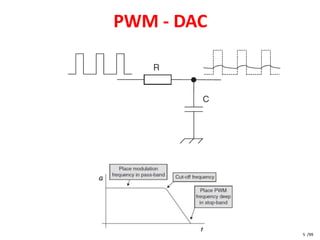
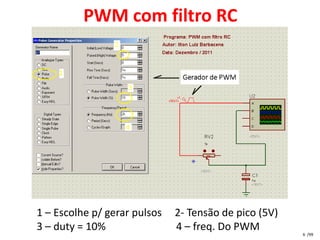
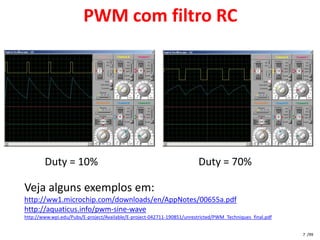
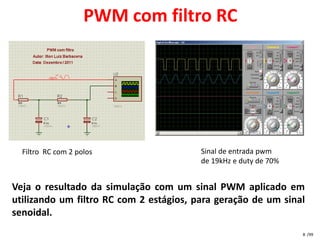
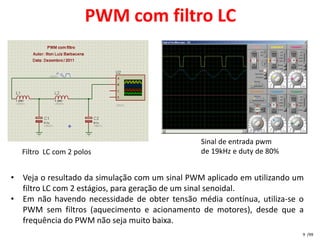
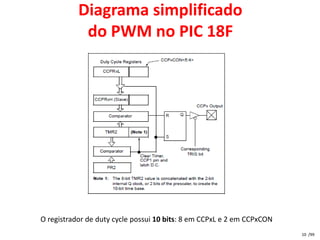
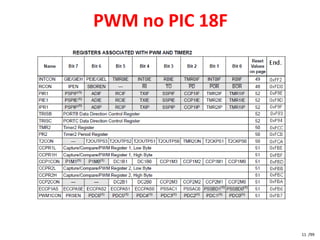
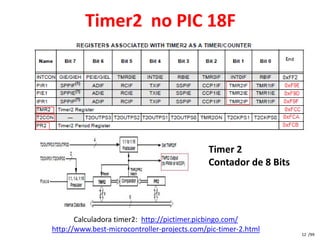
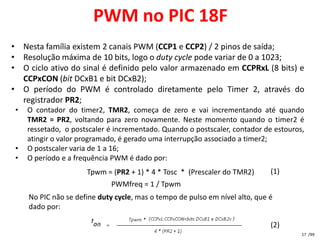
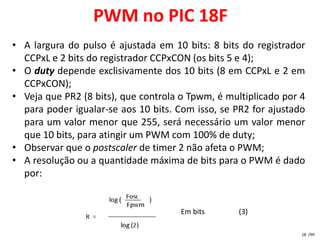
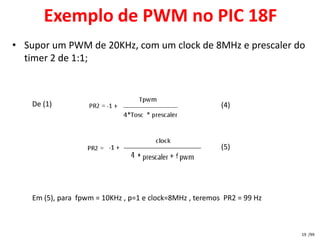
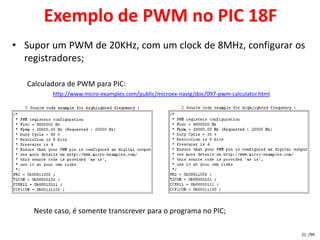
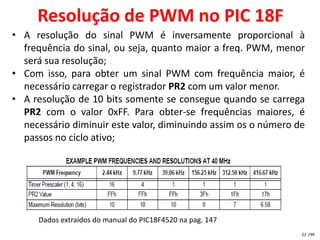

Este documento apresenta: 1. Uma introdução sobre PWM (Pulse Width Modulation) e sua aplicação para conversão digital-analógica usando filtros; 2. Detalhes sobre como implementar PWM no PIC18F usando os módulos CCP e Timer2, incluindo cálculos para configurar a frequência e duty cycle; 3. Um exemplo passo-a-passo de como gerar um PWM de 20kHz com duty variável usando um potenciômetro e exibindo no LCD.























































