Baixado 33 vezes


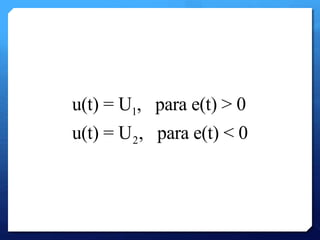
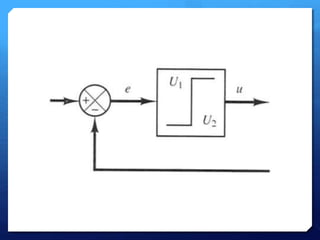
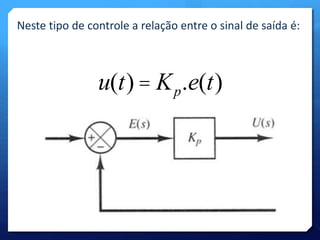

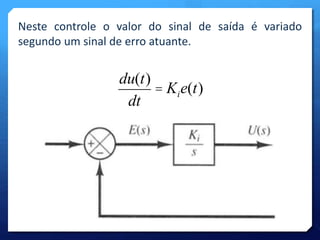
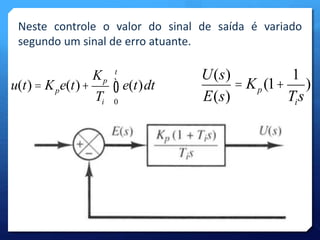
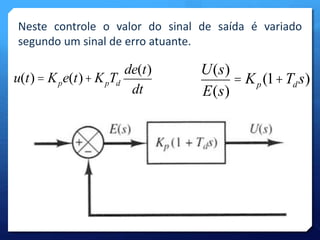
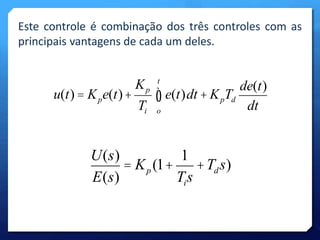
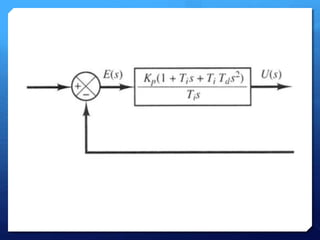
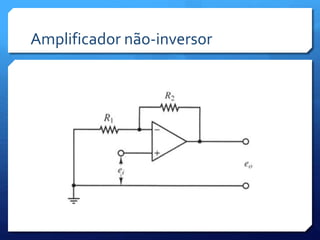
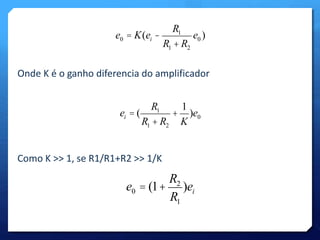

O documento discute diferentes tipos de controladores automáticos industriais, incluindo controladores de duas posições, proporcionais, integrais, proporcionais e integrais, proporcionais e derivativos, e proporcionais, integrais e derivativos. Também compara sistemas pneumáticos e hidráulicos, e discute o uso de amplificadores operacionais em controladores eletrônicos.






















































































