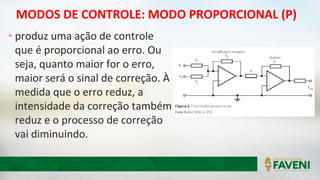
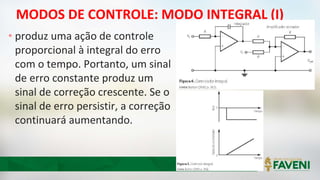
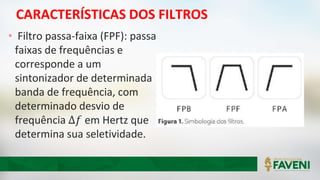
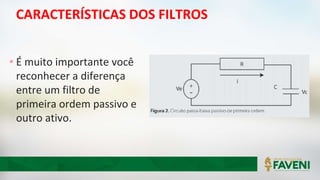
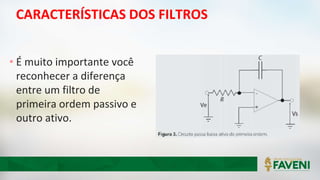
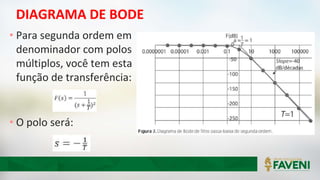
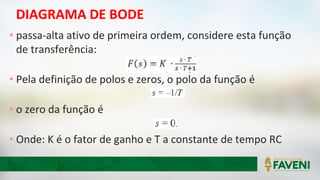
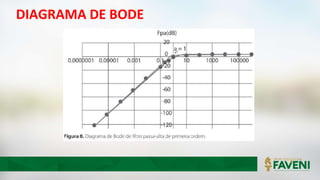
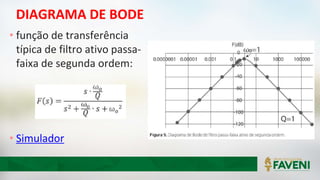
O documento discute filtros eletrônicos e modos de controle. Define filtros como circuitos que atenuam características indesejadas de um sinal de entrada ou ressaltam elementos desejados. Descreve modos de controle como proporcional, derivativo e integral e suas aplicações. Explica características e respostas em amplitude de filtros passa-baixa, passa-alta e passa-faixa.