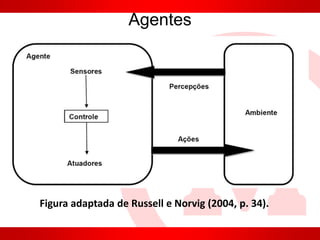

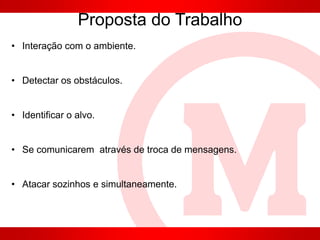


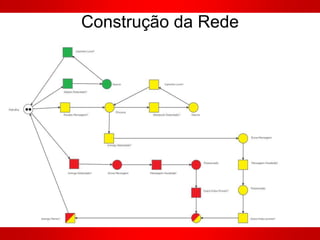
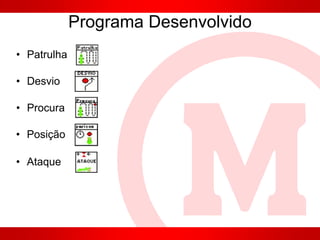
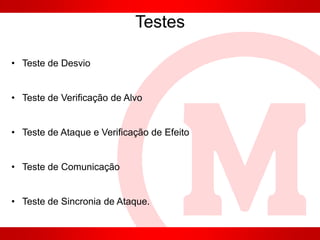

Este documento descreve um projeto de pesquisa sobre um enxame de robôs cooperativos e afetivos. O projeto propõe a construção de robôs que podem interagir com o ambiente, se comunicar entre si e atacar alvos juntos. Os robôs foram construídos com kits Lego Mindstorms e programados no Labview para realizar tarefas como patrulhamento, desvio de obstáculos e busca de alvos. Testes foram realizados para verificar a capacidade dos robôs de se comunicarem e atacarem alvos de forma sincron