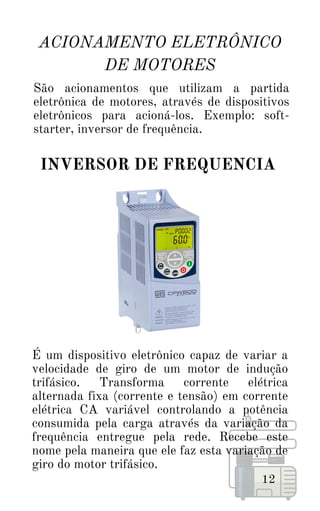
1) O documento discute acionamentos elétricos de motores, incluindo acionamentos convencionais e eletrônicos. 2) Os acionamentos eletrônicos incluem inversores de frequência e soft-starters, que permitem o controle variável da velocidade do motor. 3) Inversores de frequência transformam a tensão de entrada em uma tensão variável para controlar a frequência e velocidade do motor.







![[E-BOOK 1] - Comandos Elétricos 1.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/e-book1-comandoseltricos1-230731223144-ae158a59-thumbnail.jpg?width=640&height=640&fit=bounds)



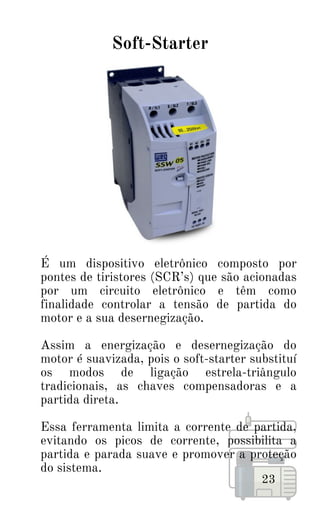
![[E-BOOK 3] - Comandos Elétricos 3.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/e-book3-comandoseltricos3-230731223143-b56b455f-thumbnail.jpg?width=640&height=640&fit=bounds)










































