Baixado 308 vezes

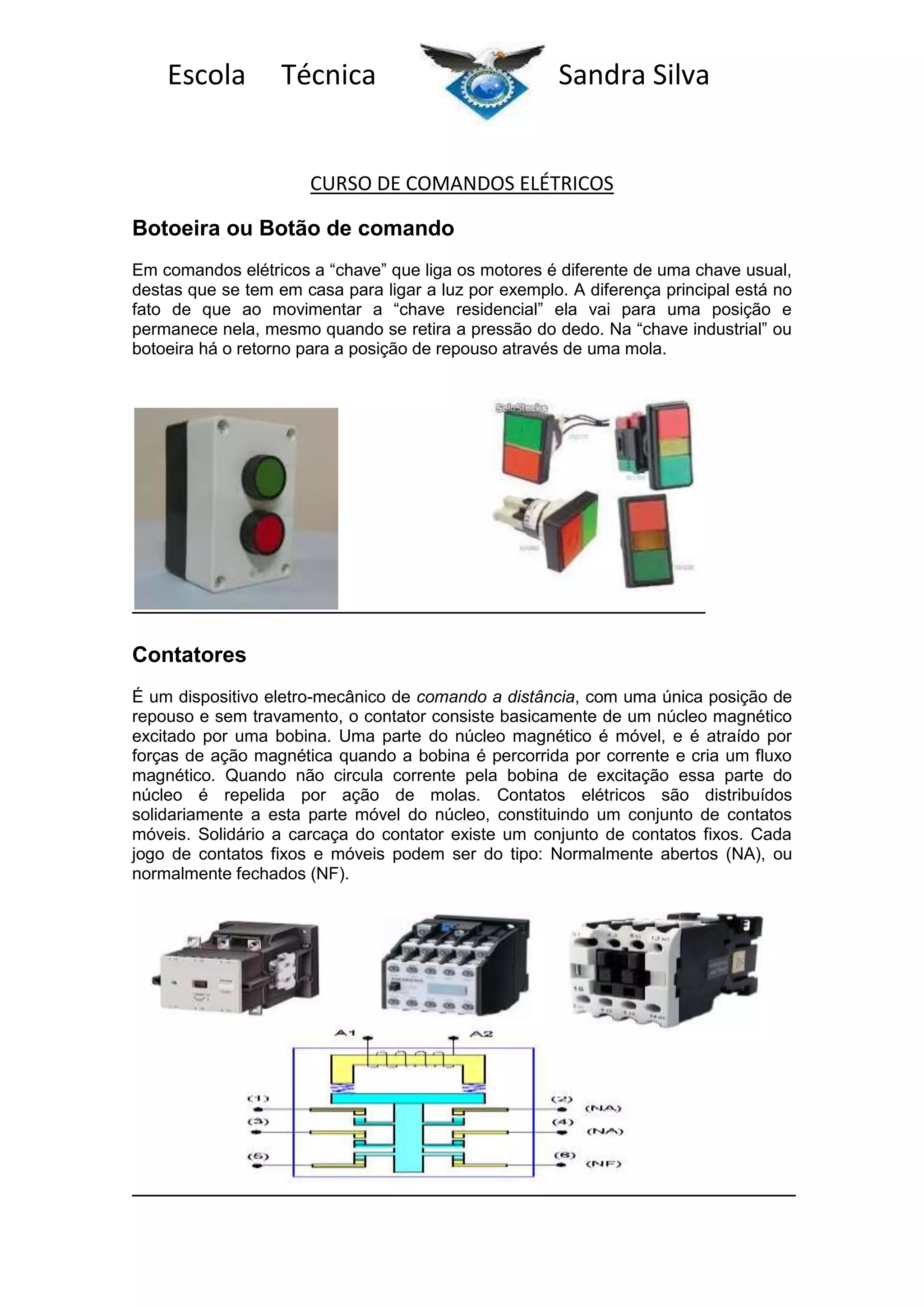




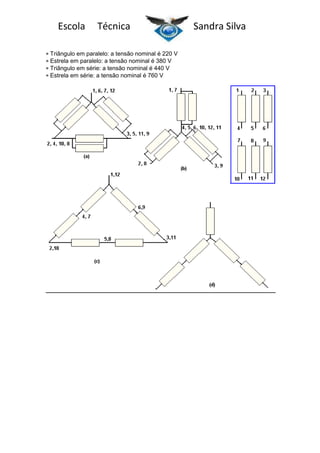
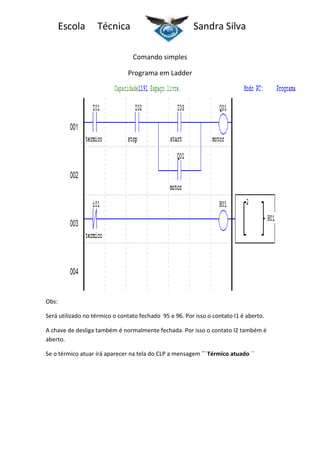
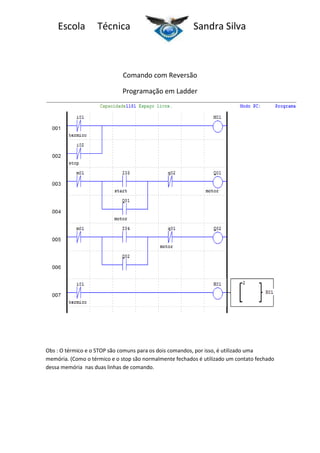



O documento discute conceitos básicos de comandos elétricos, incluindo botões de comando, contatores, fusíveis, disjuntores e relés térmicos. Também apresenta simbologia gráfica e numérica para esses componentes e exemplos de programação em ladder para diferentes tipos de comandos.








![[E-BOOK 1] - Comandos Elétricos 1.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/e-book1-comandoseltricos1-230731223144-ae158a59-thumbnail.jpg?width=640&height=640&fit=bounds)


![[E-BOOK 3] - Comandos Elétricos 3.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/e-book3-comandoseltricos3-230731223143-b56b455f-thumbnail.jpg?width=640&height=640&fit=bounds)
![[E-BOOK 2] - Comandos Elétricos 2.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/e-book2-comandoseltricos2-230731223144-16085388-thumbnail.jpg?width=640&height=640&fit=bounds)








































