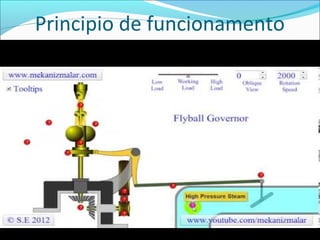
1- O primeiro controlador automático industrial foi inventado em 1775 por James Watts para controlar a velocidade das máquinas a vapor.
2- Desde então, houve um rápido progresso no desenvolvimento de novos tipos de controladores hidráulicos, eletro-hidráulicos, pneumáticos, analógicos e microprocessados para elevar a produtividade de forma segura.
3- Atualmente, os controladores eletrônicos universais podem controlar vários processos como temperatura, pressão e vazão a partir de diferentes sens