Este documento descreve a modelagem matemática do movimento de um pêndulo simples utilizando a equação diferencial ordinária de segunda ordem e o método de Runge-Kutta de segunda ordem para resolver numericamente a equação no programa MATLAB. Os resultados mostram a variação da elongação e velocidade angular em função do tempo para diferentes intervalos de tempo.





![Modelo de Pêndulo Simples
UEM ESCMC
MODELAÇÂO E SIMULAÇÂO DOS PROCESSOS OCEANICOS
7
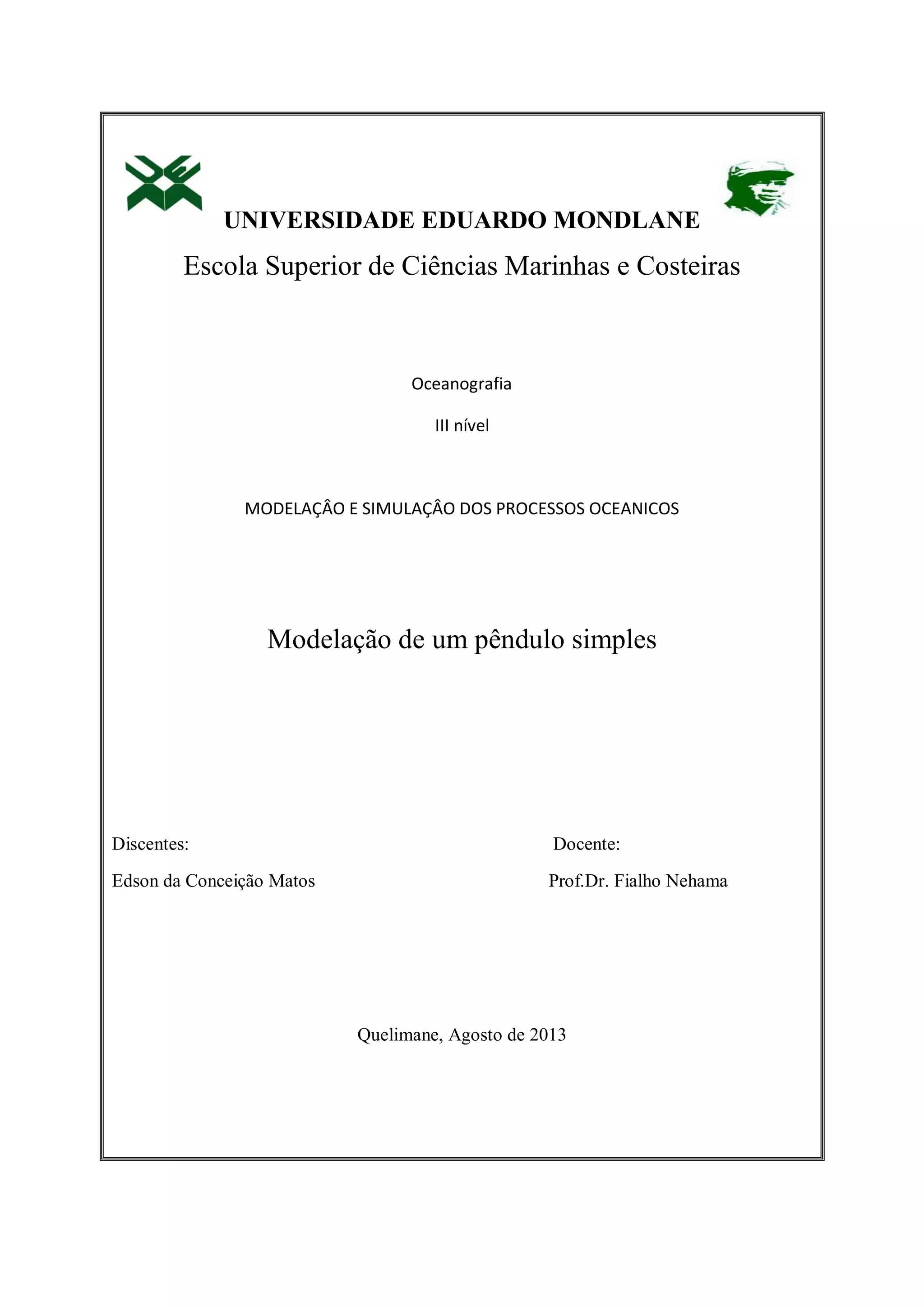
K1 = Pi , K2 = Pi
Considerou-se os seguintes valores numéricos: g = 9.8m/s2
, l = 0.5m , (0) = 60º e p(0) =
d/dt = 0 (velocidade inicial), usando o Método de Runge-Kutta de 2ª ordem (h = t = 0,01
s), verifica se instabilidade das soluções para os valores crescentes de tempo Fig2.
Fig. 2. 1º Gráfico ilustra elongação na solução numérica o 2º gráfico ilustra a variação da
velocidade angular p = d/dt e do deslocamento angular versus tempo no intervalo de 0-
10segundos.
0 1 2 3 4 5 6 7 8 9 10
-10
-5
0
5
10
Elongação dum pêndulo simples
T [s]
Elongação[m]
Solução Numérica
Solução Analítica
0 1 2 3 4 5 6 7 8 9 10
-10
-5
0
5
10
Velocidade dum pêndulo simples
Tempo [s]
Velocidade[m/s]
Solução Numérica
Solução Analítica](https://image.slidesharecdn.com/trabalho1demodelaodependulo-140815094606-phpapp01/85/Modelo-de-um-pendulo-simples-7-320.jpg)
![Modelo de Pêndulo Simples
UEM ESCMC
MODELAÇÂO E SIMULAÇÂO DOS PROCESSOS OCEANICOS
8
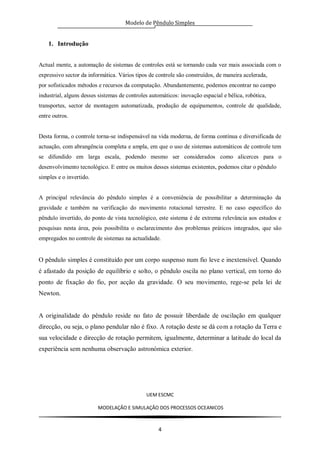
Usando o Método de Runge-Kutta de 2ª ordem com (h = t = 0,001 s) com valores
numéricos: g = 9.8m/s2
, l = 0.5m , (0) = 60º e p(0) = d/dt = 0 (velocidade inicial), as
soluções são estáveis e não apresenta instabilidade na resposta para tempos crescentes fig3.
Fig3 1º Gráfico ilustra elongação na solução numérica o 2º gráfico ilustra a variação da
velocidade angular p = d/dt e do deslocamento angular versus tempo no intervalo de 0-10
segundos.
4. Cálculo da E.D.O. de 2ª. Ordem do pêndulo simples no Programa Matlab 7.0
Usou-se o Método de Runge - Kutta de 2ª ordem com condições de contorno: p(0) = 0, q(0) =
60
clear;
% constantes para o cálculo da elongação e velocidade:
0 1 2 3 4 5 6 7 8 9 10
-5
0
5
Elongação dum pêndulo simples
T [s]
Elongação[m]
Solução Numérica
Solução Analítica
0 1 2 3 4 5 6 7 8 9 10
-5
0
5
Velocidade dum pêndulo simples
Tempo [s]
Velocidade[m/s]
Solução Numérica
Solução Analítica](https://image.slidesharecdn.com/trabalho1demodelaodependulo-140815094606-phpapp01/85/Modelo-de-um-pendulo-simples-8-320.jpg)

![Modelo de Pêndulo Simples
UEM ESCMC
MODELAÇÂO E SIMULAÇÂO DOS PROCESSOS OCEANICOS
10
hold on
plot(t,q,'k')
title('Elongação dum pêndulo simples','fontsize',14)
legend('Solução Numérica','Solução Analítica')
xlabel('T [s]')
ylabel('Elongação [m]')
grid
subplot(2,1,2)
plot(t,p,'.r')
hold on
plot(t,q,'color','k')
title('Velocidade dum pêndulo simples','fontsize',14)
legend('Solução Numérica',' Solução Analítica')
xlabel('Tempo [s]')
ylabel('Velocidade [m/s]')
grid](https://image.slidesharecdn.com/trabalho1demodelaodependulo-140815094606-phpapp01/85/Modelo-de-um-pendulo-simples-10-320.jpg)
![Modelo de Pêndulo Simples
UEM ESCMC
MODELAÇÂO E SIMULAÇÂO DOS PROCESSOS OCEANICOS
11
5. Resultados
No estudo feito resulto se na Fig.4 a ilustração da variação da elongação e velocidade angular
p = d/dt e do deslocamento angular versus tempo no intervalo de zero a três mil e
seiscentos segundos, a elongação os valores da solução numérica e analítica não
apresentaram variações considerável nos primeiros segundos na condição de h = t = 0.001 s,
mais com o aumento do tempo verifica se uma instabilidade cresce provavelmente por terem
percorrido diferente espaço e em unidade de tempo similares.
Fig. 4 o 1º Gráfico ilustra elongação na solução numérica o 2º gráfico ilustra a variação da
velocidade angular p = d/dt e do deslocamento angular versus tempo.
0 20 40 60 80 100 120
-10
-5
0
5
10
Elongação dum pêndulo simples
T [s]
Elongação[m]
Solução Numérica
Solução Analítica
0 20 40 60 80 100 120
-10
-5
0
5
10
Velocidade dum pêndulo simples
Tempo [s]
Velocidade[m/s]
Solução Numérica
Solução Analítica](https://image.slidesharecdn.com/trabalho1demodelaodependulo-140815094606-phpapp01/85/Modelo-de-um-pendulo-simples-11-320.jpg)
![Modelo de Pêndulo Simples
UEM ESCMC
MODELAÇÂO E SIMULAÇÂO DOS PROCESSOS OCEANICOS
12
Na Fig.5 com a condição de h = t = 0.01 s no intervalo de 0-3600 segundos, verifica se a
instabilidade os valores das soluções crescem na medida em que o tempo aumenta nota se um
aumento brusco nos primeiros segundos para a elongação tanto para a velocidade, a diferença
é de pequena escala no espaço da na solução analítica Fig.2 e no mesmo tempo.
Fig. 5. 1º Gráfico ilustra elongação na solução numérica o 2º gráfico ilustra a variação da
velocidade angular p = d/dt e do deslocamento angular versus tempo no intervalo de 0-
10segundos.
6. Discussão
Tendo usado o Método de Runge-Kutta de 2ª ordem para a modelagem de pêndulos simples
com (h = t = 0,001s no intervalo de tempo(s) de 0-100 na Fig.4, e para h = t = 0,01 no
intervalo de 0-3600s na Fig.4) e valores numéricos g = 9.8m/s2
, l = 0.5m , (0) = 60º e p(0)
= d/dt = 0 (velocidade inicial), o processamento de dados levou mais de 6 horas de tempo e
por fim o programa de para a o plote dos gráficos, num computador com a Unidade de
Central de Processamento (CPU) de 1.86GHz e Memória de acesso aleatório (RAM) de 2Gb,
com estas condições precisaremos de fazer uma diminuição do tempo caso for para analises
imediatas no intervalo de 0-10segundos ilustrado na Fig.2 e Fig.3.
0 500 1000 1500 2000 2500 3000 3500 4000
-50
0
50
100
150
Elongação dum pêndulo simples
T [s]
Elongação[m]
Solução Numérica
Solução Analítica
0 500 1000 1500 2000 2500 3000 3500 4000
-50
0
50
100
150
Velocidade dum pêndulo simples
Tempo [s]
Velocidade[m/s]
Solução Numérica
Solução Analítica](https://image.slidesharecdn.com/trabalho1demodelaodependulo-140815094606-phpapp01/85/Modelo-de-um-pendulo-simples-12-320.jpg)





































































