Baixar para ler offline



















1. O documento descreve arrancadores eletrônicos e variadores de velocidade, suas funções principais e tipos de controladores. 2. As funções principais incluem aceleração controlada, controle e regulação de velocidade, controle da desaceleração, inversão do sentido de rotação e proteção incorporada. 3. Existem quatro modos de funcionamento principais - unidirecional, bidirecional, com binário constante e com binário variável - e dois tipos de controladores - unidirecional e











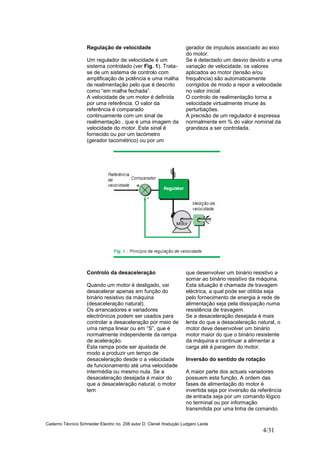
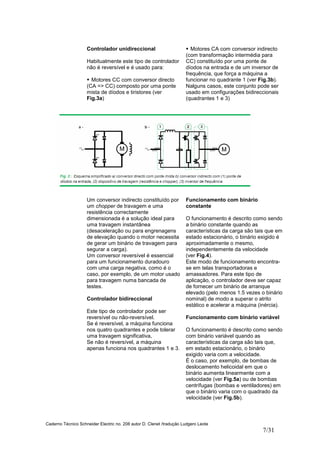
![[E-BOOK 1] - Comandos Elétricos 1.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/e-book1-comandoseltricos1-230731223144-ae158a59-thumbnail.jpg?width=640&height=640&fit=bounds)


































