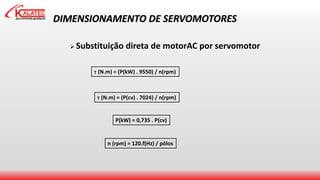
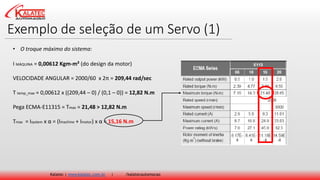
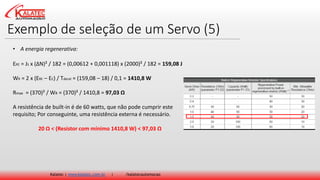
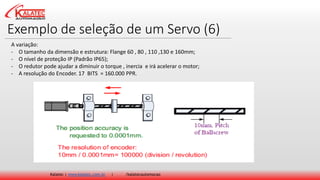
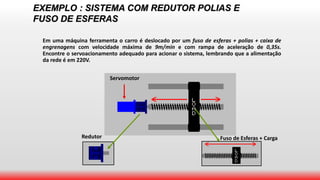
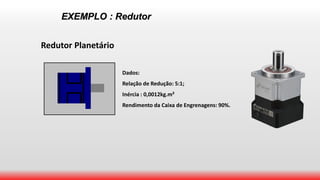
Este documento fornece instruções sobre como selecionar um servo motor adequado para uma aplicação, incluindo cálculos de torque, inércia e energia regenerativa. Resume os principais pontos como dimensionar o servo motor considerando a carga mecânica, velocidade e aceleração requerida.





















![[E-BOOK 2] - Comandos Elétricos 2.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/e-book2-comandoseltricos2-230731223144-16085388-thumbnail.jpg?width=640&height=640&fit=bounds)








![Apostila tiristor scr[1]](https://cdn.slidesharecdn.com/ss_thumbnails/apostilatiristorscr1-170609042525-thumbnail.jpg?width=640&height=640&fit=bounds)