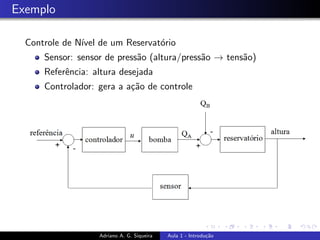
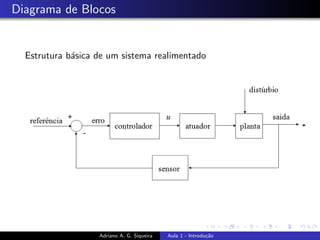
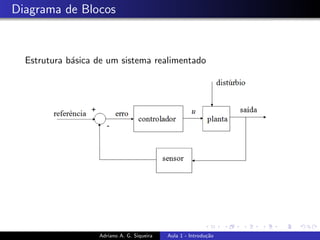
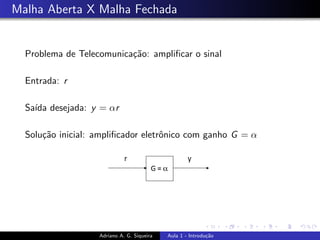
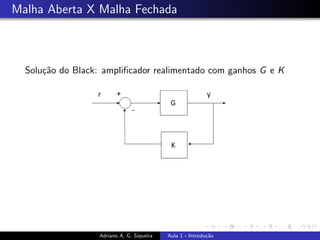
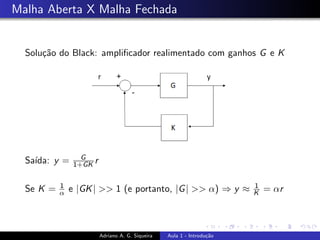
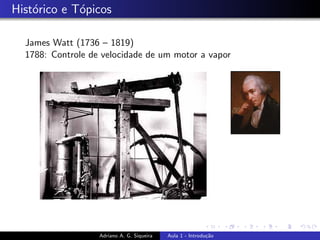
O documento aborda os conceitos fundamentais de controle, incluindo definições de sistema, variável e ação de controle. Apresenta a diferença entre controle manual e automático, além de discutir os tipos de malhas, como malha aberta e malha fechada. O autor também menciona importantes históricos e contribuições no campo do controle, destacando figuras notáveis e suas inovações.