Baixado 551 vezes





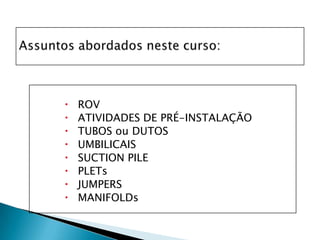
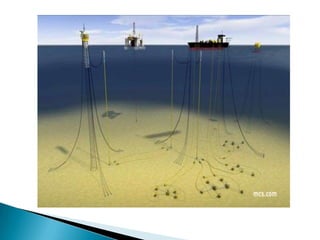
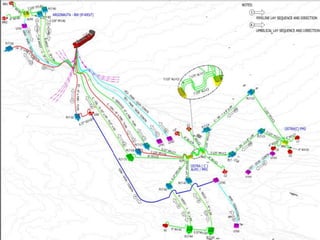

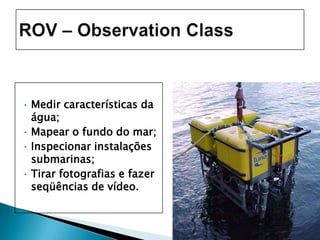
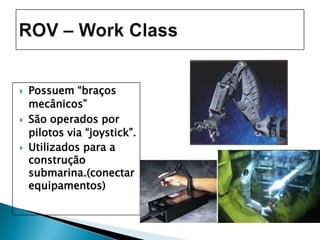





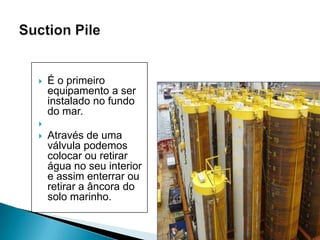
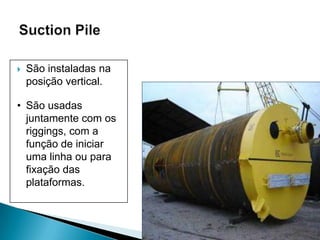
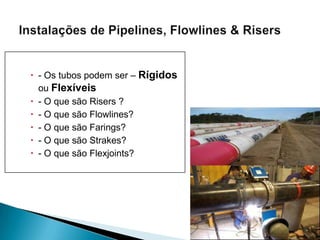

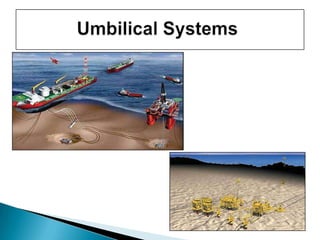




O documento discute instalações submarinas para a indústria de petróleo e gás natural. Aborda tópicos como ROVs, atividades de pré-instalação, tubos e dutos, umbilicais, suction piles e equipamentos submarinos. O objetivo é adquirir conhecimentos sobre construção submarina para atuação em empresas de petróleo e gás.























































































