Transferir como PDF, PPTX

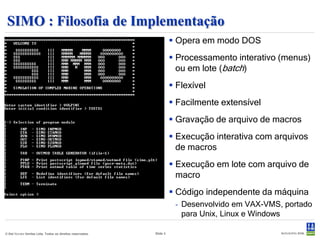
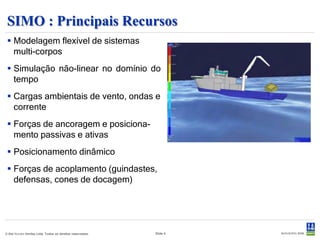
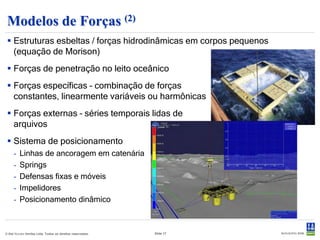

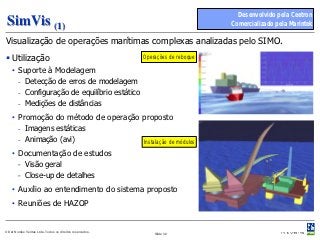
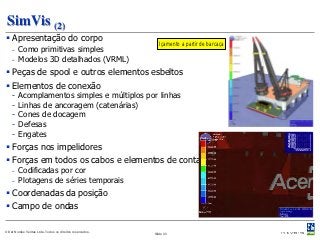




O documento apresenta o software SIMO, desenvolvido pela MARINTEK para simulação de operações marítimas. O SIMO permite modelagem flexível de sistemas multi-corpos e simulação do movimento considerando forças ambientais e de posicionamento. Fornece ferramentas para análise de segurança e desempenho de operações offshore complexas.





















































































