Transferir como PDF, PPTX


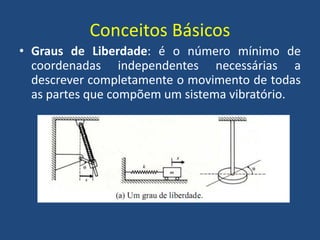
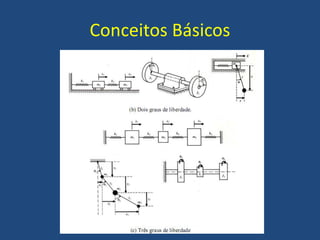
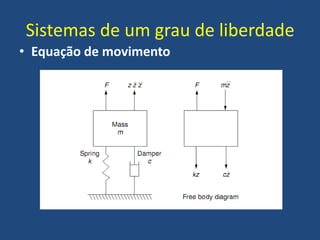
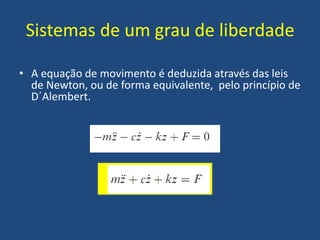
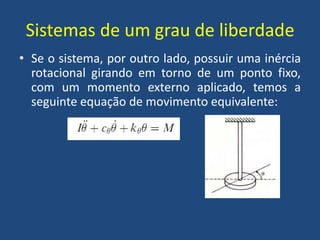
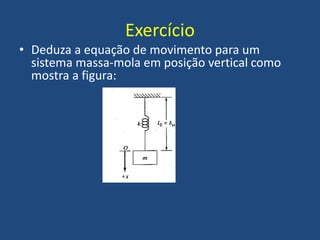
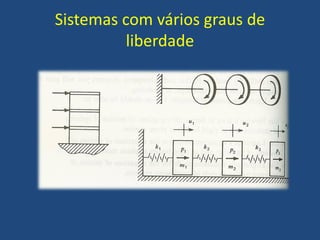
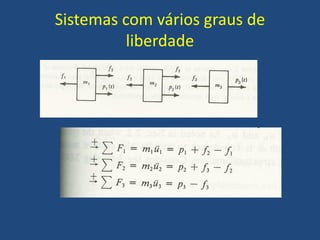
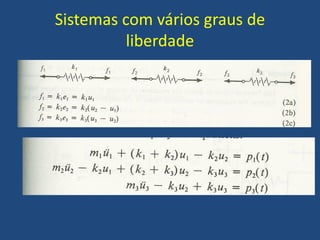
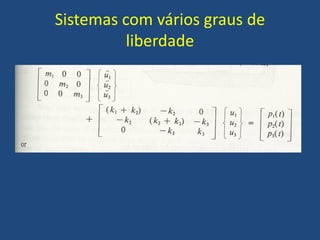
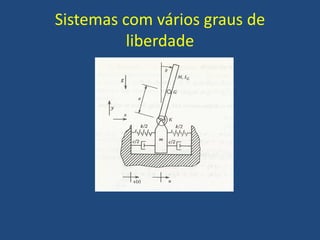
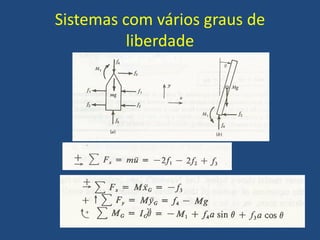

O documento apresenta uma introdução sobre vibrações mecânicas, abordando seu histórico, importância, conceitos básicos e tipos de sistemas dinâmicos. É feita uma distinção entre sistemas estáticos e dinâmicos, e são apresentados os principais componentes e conceitos relacionados a análises de vibrações, como graus de liberdade, sistemas discretos e contínuos. Por fim, são descritos procedimentos para análise de sistemas com um e vários graus de liberdade.



































































