Transferir como PDF, PPTX

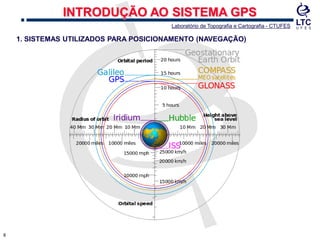
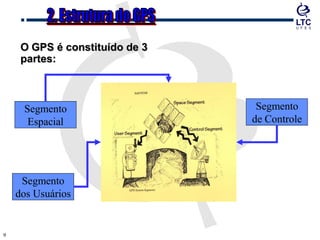
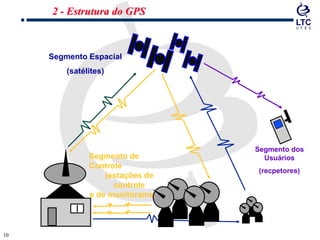
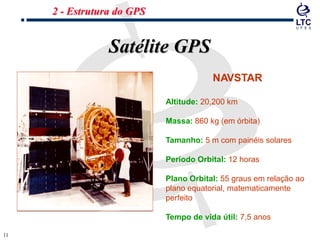
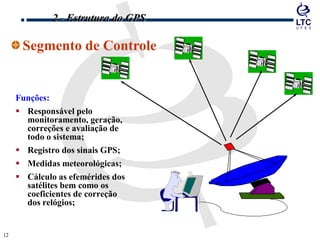
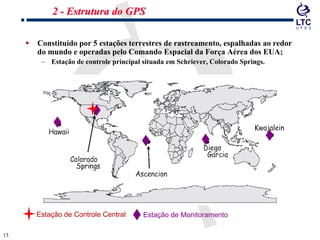
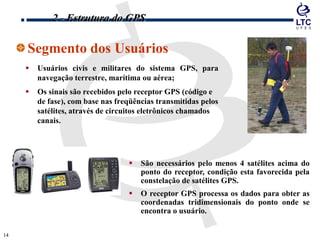
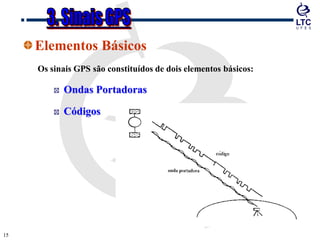
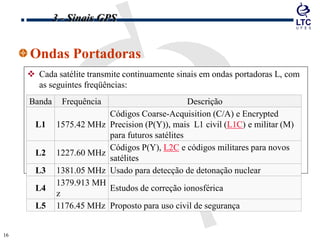
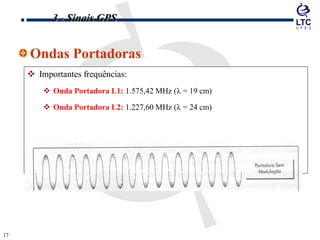
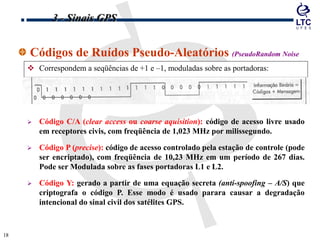

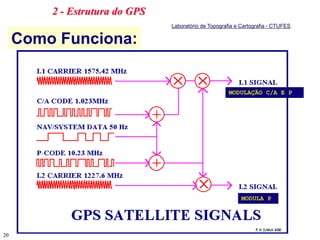
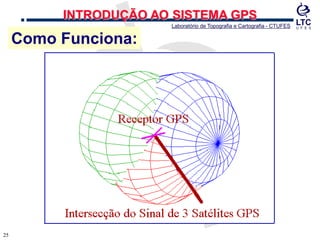
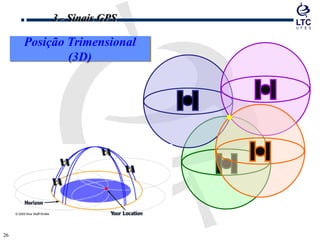
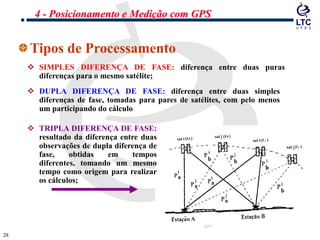
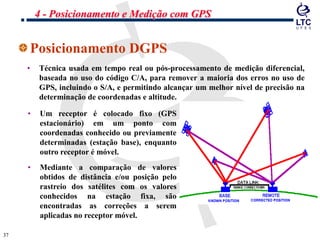
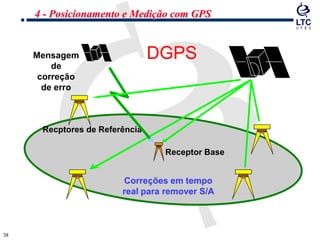
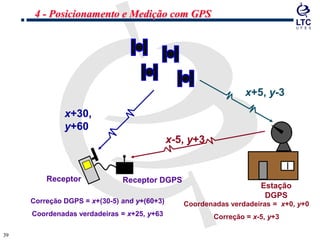

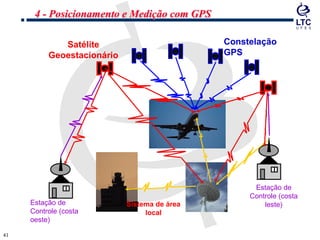
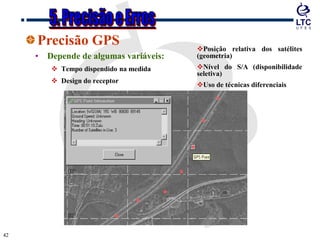
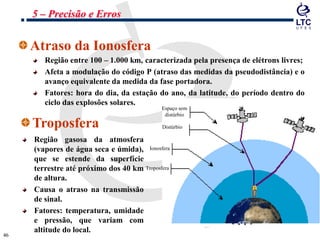
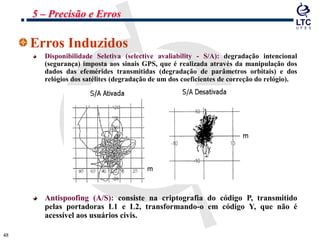

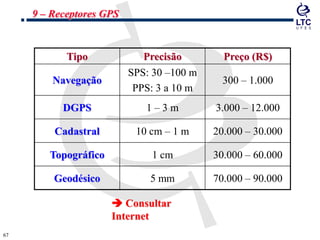



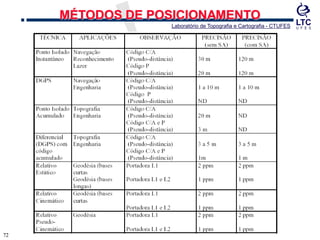

O documento fornece uma introdução ao Sistema de Posicionamento Global (GPS), descrevendo sua estrutura em três segmentos (espacial, de controle e de usuários), os sinais transmitidos pelos satélites e diferentes métodos de posicionamento e medição.