Baixar para ler offline






![Representação Trigonométrica dos Números Complexos
Já sabemos que dada uma recta orientada, existe uma correspondência biunı́voca entre
cada ponto da recta e o conjunto dos números reais, R. Assim, como identificamos o número
complexo (a, 0) com o número real a, os complexos da forma a + i0 serão representados na
recta.
Como representar, por exemplo, os imaginários puros? Repare-se que uma rotação de
180o
em torno da origem corresponde a uma multiplicação por −1. Ora, uma rotação de
90o
deverá corresponder a multiplicar por k de modo que k2
= −1. Logo, k terá que ser
a unidade imaginária i. Convencionaremos que o sentido positivo das rotações é o sentido
contrário ao dos ponteiros do relógio. Portanto, passaremos a representar os números reais
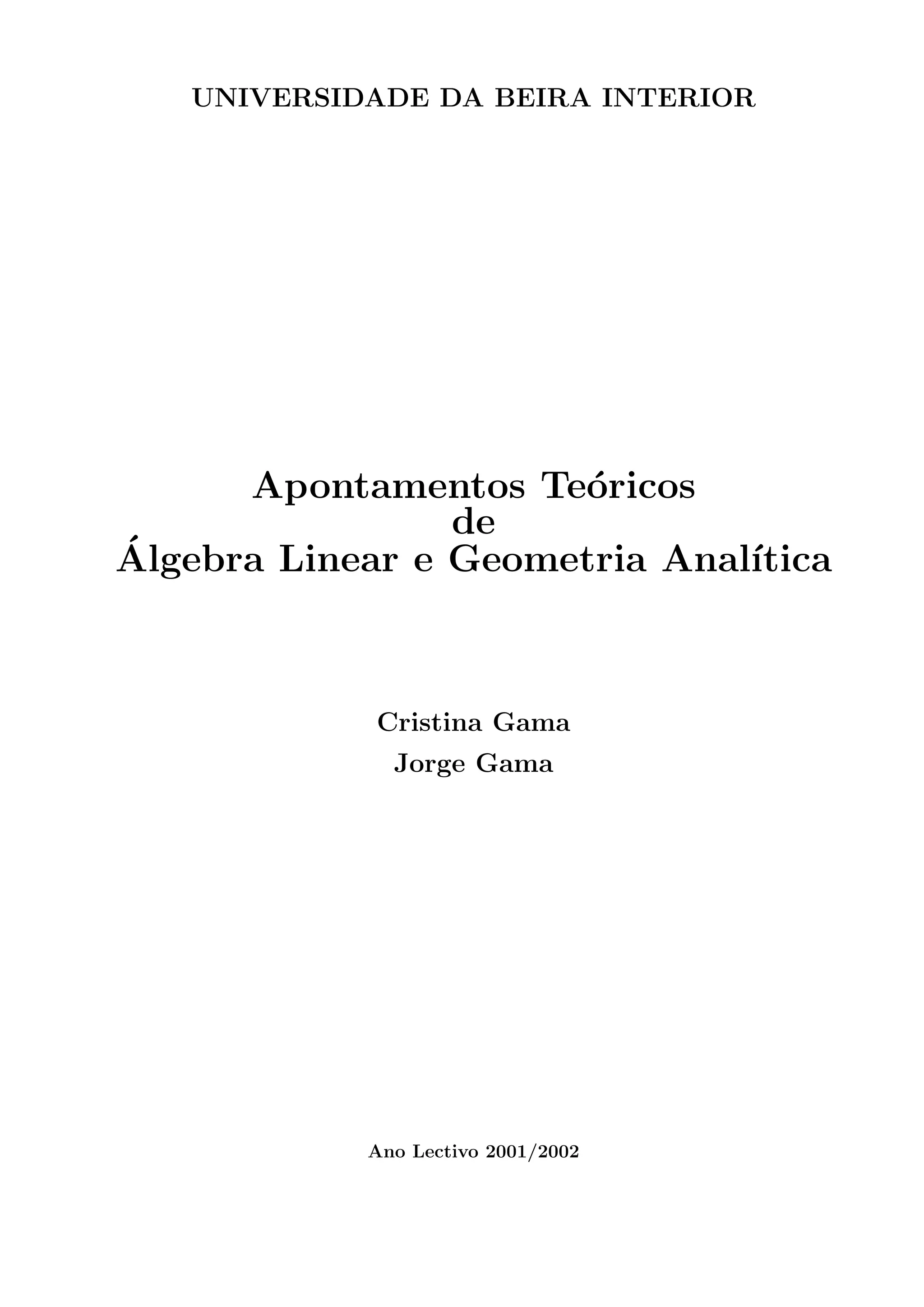
num eixo horizontal (eixo real) e os imaginários puros num eixo vertical (eixo imaginário).
Assim, um ponto P do plano de abcissa a e ordenada b será a imagem do complexo z = a+bi.
-
6
r
O
P
a
b
ρ
θ
Plano de Argand
Sabemos que o comprimento OP é o número real |z| =
√
a2 + b2 (Teorema de Pitágoras).
Representemos este número por ρ. Repare-se que o ponto P fica bem definido se consider-
armos ρ e o ângulo θ que o segmento [OP] faz com a parte positiva do eixo real.
Chama-se argumento principal ao ângulo θ ∈] − π, π]. Assim, a imagem do complexo
z fica bem definida se conhecermos ρ := |z| e θ := arg(z). Observe-se que se fizermos
θ = arg(z) + 2kπ, k ∈ Z, obtemos sempre a mesma imagem. Portanto, a cada complexo
podemos associar uma infinidade de argumentos. Além do principal, o argumento positivo
mı́nimo de z = a + bi é tal que θ ∈ [0, 2π[ e tg θ =
b
a
.
Observe a figura anterior para concluir que para todo o complexo z = a + bi,
a = ρ cos θ
b = ρ sen θ
Assim, a forma trigonométrica de z é
z = ρ(cos(θ) + i sen(θ)).
Abreviadamente, z = ρ cis(θ).
Se z ∈ C é tal que z = a + bi = ρ cis(θ), então z = a − bi = ρ cis(−θ).
6](https://image.slidesharecdn.com/apostiladealgebralinear-230129200250-d27ddb70/85/Apostila-de-Algebra-Linear-pdf-7-320.jpg)



 (1 ≤ i ≤ m, 1 ≤ j ≤ n)
ou, apenas, por A.
Duas matrizes A = [aij] e B = [bij] dizem-se iguais se, e somente se, são do mesmo tipo
e aij = bij, para todos os valores de i e j.
Designa-se por MK(m, n) o conjunto de todas as matrizes sobre o corpo K e de ordem
(m, n) (m linhas, n colunas).
Se K = R, a matriz diz-se real. Se K = C, a matriz diz-se complexa.
Matrizes Especiais
Seja A = [aij] ∈ MK(m, n).
1. Se n = 1, a matriz A diz-se matriz coluna.
a11
a21
.
.
.
am1
2. Se m = 1, a matriz A diz-se matriz linha.
a11 a12 · · · a1n
10](https://image.slidesharecdn.com/apostiladealgebralinear-230129200250-d27ddb70/85/Apostila-de-Algebra-Linear-pdf-11-320.jpg)
![3. Se m = n, a matriz A diz-se quadrada de ordem n.
a11 a12 · · · a1n
a21 a22 · · · a2n
.
.
. · · · · · · · · ·
an1 an2 · · · ann
Numa matriz quadrada, os elementos a11, a22, . . . , ann dizem-se elementos principais
ou diagonais e formam a primeira diagonal ou diagonal principal. Os elementos
a1n, a2,n−1, . . . , an1 formam a segunda diagonal ou diagonal secundária.
Diagonal Principal Diagonal Secundária
3.1 Uma matriz quadrada A diz-se triangular superior se aij = 0, para i j.
Exemplo:
−2 1 3
0 4 −1
0 0 −5
3.2 Uma matriz quadrada A diz-se triangular inferior se aij = 0, para i j.
Exemplo:
2 0 0
−1 3 0
7 4 −2
3.3 Uma matriz quadrada A diz-se diagonal se aij = 0, para i 6= j.
Exemplo:
−1 0 0 0
0 3 0 0
0 0 5 0
0 0 0 −1
3.4 Uma matriz quadrada A diz-se escalar se é diagonal e aii = a 6= 0, para todo o i.
Exemplo:
3 0 0 0
0 3 0 0
0 0 3 0
0 0 0 3
Utilizando-se o sı́mbolo de Kronecker, δij, definido por
δij =
0, se i 6= j,
1, se i = j,
uma matriz escalar pode representar-se apenas por [aδij].
11](https://image.slidesharecdn.com/apostiladealgebralinear-230129200250-d27ddb70/85/Apostila-de-Algebra-Linear-pdf-12-320.jpg)
![Exemplo:
3 0 0 0
0 3 0 0
0 0 3 0
0 0 0 3
= [3δij]
A matriz identidade é a matriz escalar [δij]. Designa-se, em geral, por In.
I1 = [1] I2 =
1 0
0 1
I3 =
1 0 0
0 1 0
0 0 1
I4 =
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
. . .
4. Uma matriz formada por r linhas (r ≤ m) e s colunas (s ≤ n) de uma matriz A diz-se
uma submatriz de A do tipo r × s.
Exemplo:
A matriz
2 0
−1 4
é submatriz de
2 0 4 1
−1 4 −3 0
5 −6 8 1/2
.
5. A matriz A diz-se matriz nula se todos os elementos são nulos (aij = 0, para todos
os valores de i e j). Designa-se a matriz nula por 0m×n, ou simplesmente por 0, se não
houver ambiguidade quanto ao seu tipo.
Exemplo:
0 0 0
0 0 0
0 0 0
6. A matriz oposta da matriz A = [aij](m,n) é uma matriz do mesmo tipo definida por
−A = [−aij] .
Exemplo:
A =
−1 2
3 5
1/2 −
√
2
− A =
1 −2
−3 −5
−1/2
√
2
7. Denomina-se matriz transposta de A a matriz AT
que se obtém de A trocando orde-
nadamente as linhas por colunas e as colunas por linhas. Se A é do tipo m × n, AT
é do
tipo n × m.
Exemplo:
A =
2 −5 7
−3 2 1
AT
=
2 −3
−5 2
7 1
Propriedade 2.2 AT
T
= A.
12](https://image.slidesharecdn.com/apostiladealgebralinear-230129200250-d27ddb70/85/Apostila-de-Algebra-Linear-pdf-13-320.jpg)

![Propriedades 2.4
1. (A∗
)T
= A.
2. (A∗) = AT
.
3. (A∗
)∗
= A.
12. Uma matriz A diz-se hermı́tica ou hermitiana se é igual à sua associada, isto é, se
A = A∗
.
Logo, os seus elementos verificam a relação aij = aji e é uma matriz quadrada.
Em particular, para i = j, tem-se aii = aii = a ∈ R, isto é, aii é um número real.
Exemplo:
5 5 + 2i 3i 0
5 − 2i −1 9 2 − i
−3i 9 7 7 + 2i
0 2 + i 7 − 2i −4
13. Uma matriz A diz-se hemi-hermı́tica ou hemi-hermitiana se satisfaz a relação
A = −A∗
.
Logo, os seus elementos verificam a relação aij = −aji e é uma matriz quadrada.
Em particular, para i = j, tem-se aii = −aii, isto é, Re(aii) = 0.
Exemplo:
5i 5 5 − i 3 − 2i
−5 −2i 2 + i 9i
−5 − i −2 + i 7i 9
−3 − 2i 9i −9 −i
Operações com Matrizes
1. Adição: Sejam A = [aij], B = [bij] ∈ MK(m, n). Define-se adição de A com B como
sendo a matriz S = A + B ∈ MK(m, n) cujos elementos são obtidos pela relação
sij = aij + bij.
Exemplo:
2 6 0
−1 4 7
+
1 0 4
−4 1 −3
=
3 6 4
−5 5 4
Propriedades 2.5 (Adição de Matrizes)
a) A adição de matrizes é comutativa, isto é,
∀A, B ∈ MK(m, n), A + B = B + A.
14](https://image.slidesharecdn.com/apostiladealgebralinear-230129200250-d27ddb70/85/Apostila-de-Algebra-Linear-pdf-15-320.jpg)
![b) A adição de matrizes é associativa, isto é,
∀A, B, C ∈ MK(m, n), (A + B) + C = A + (B + C).
c) A adição de matrizes tem elemento neutro, a matriz nula
0 · · · 0
.
.
. · · ·
.
.
.
0 · · · 0
(m,n)
d) Todas as matrizes em MK(m, n) têm oposto. O elemento oposto de A ∈ MK(m, n) é
a matriz −A ∈ MK(m, n).
∴ (MK(m, n), +) é um grupo abeliano.
e) Sejam A1, A2, . . . , Ap ∈ MK(m, n). Então
(A1 + A2 + · · · + Ap)T
= AT
1 + AT
2 + · · · + AT
p .
f) Se A ∈ MC(n, n), então A + A∗
é hermı́tica e A − A∗
é hemi-hermı́tica.
g) Se A ∈ MK(n, n), então A + AT
é simétrica e A − AT
é anti-simétrica.
2. Multiplicação de uma Matriz por um Escalar:
Sejam A = [aij] ∈ MK(m, n) e λ ∈ K. É usual denominar qualquer elemento de um
corpo por escalar. Define-se produto do escalar λ pela matriz A como sendo a matriz
λA = [λaij].
Exemplo:
Se A =
2 5 7
1 0 −2
e λ = 2, então λA =
4 10 14
2 0 −4
.
Propriedades 2.6 Sejam A, B ∈ MK(m, n) e α, β ∈ K.
i) 1 · A = A;
ii) α(βA) = (αβ)A = β(αA);
iii) (α + β)A = αA + βA;
iv) α(A + B) = αA + αB;
v) Se K = C e m = n, uma matriz A pode exprimir-se como soma de uma matriz
hermı́tica e uma hemi-hermı́tica, ou de uma matriz simétrica e outra anti-simétrica.
3. Multiplicação de Matrizes:
Sejam A = [aik] ∈ MK(m, p) e B = [blj] ∈ MK(p, n). As matrizes A e B dizem-
-se encadeadas porque o número de colunas de A é igual ao número de linhas de B.
Define-se multiplicação da matriz A pela matriz B como sendo uma matriz C do tipo
m × n, cujos elementos cij satisfazem a igualdade
cij =
p
X
k=1
aikbkj,
15](https://image.slidesharecdn.com/apostiladealgebralinear-230129200250-d27ddb70/85/Apostila-de-Algebra-Linear-pdf-16-320.jpg)



![Qualquer destas matrizes tem r filas independentes e quaisquer r + 1 filas passam a ser
dependentes. Logo, Car A = r.
Aplicação à Resolução de Sistemas de Equações Lineares
Considere-se um sistema de m equações com n incógnitas:
a11x1 + a12x2 + · · · + a1nxn = b1
· · · · · · · · · · · · · · · · · ·
am1x1 + am2x2 + · · · + amnxn = bm
Observe-se que fazendo
A =
a11 a12 · · · a1n
a21 a22 · · · a2n
.
.
. · · · · · · · · ·
am1 am2 · · · amn
(Matriz dos Coeficientes),
B =
b1
b2
.
.
.
bm
(Matriz dos Termos Independentes) e X =
x1
x2
.
.
.
xn
,
o sistema de equações é equivalente à equação matricial AX = B.
Sabemos que as operações elementares transformam o sistema dado num sistema equiva-
lente. Assim, podemos encontrar a(s) solução(ões), caso exista(m), aplicando o método de
condensação à matriz ampliada ou completa:
[A|B] =
a11 · · · a1n | b1
.
.
. · · ·
.
.
. |
.
.
.
am1 · · · amn | bm
.
Atenção: A troca de duas colunas em A correspondem a uma troca de incógnitas.
Condensando [A|B], ou melhor, condensando A, até determinar a sua caracterı́stica r,
temos:
1o
Caso: m = n = r
α11 α12 · · · α1n | β1
0 α22 · · · α2n | β2
· · ·
...
... · · · |
.
.
.
0 · · · 0 αnn | βn
19](https://image.slidesharecdn.com/apostiladealgebralinear-230129200250-d27ddb70/85/Apostila-de-Algebra-Linear-pdf-20-320.jpg)

![3o
Caso: Se r m, temos que
α11 α12 · · · α1r | · · · α1n | β1
0 α22 · · · α2r | · · · α2n | β2
· · ·
... ... · · · | · · · · · · |
.
.
.
0 · · · 0 αrr | · · · αrn | βr
−− −− −− −− | −− −− | −−
0 · · · · · · 0 | 0 · · · · · · 0 | βr+1
· · · · · · · · · · · · | · · · · · · |
.
.
.
0 · · · · · · 0 | 0 · · · · · · 0 | βm
e duas possibilidades:
1. βr+1 = · · · = βm = 0;
2. βr+1, . . . , βm não todos nulos.
1. Se as últimas m − r linhas somente têm elementos nulos, as equações transformam-se em
0 = 0. Logo, fica
α11 α12 · · · α1r | · · · α1n | β1
0 α22 · · · α2r | · · · α2n | β2
· · ·
...
... · · · | · · · · · · |
.
.
.
0 · · · 0 αrr | · · · αrn | βr
e tal como antes,
sistema possı́vel
determinado, se r = n,
indeterminado, se r n, com grau de indeterminação n − r.
2. Se nas últimas equações algum βj 6= 0, obtemos 0x1 + 0x2 + · · · + 0xn = βj. Logo, o
sistema é impossı́vel. Neste caso, a caracterı́stica de [A|B] é maior que r, isto é, maior
do que a caracterı́stica de A.
Em Resumo:
Sistema Possı́vel: Car A = Car[A|B]
Sistema Possı́vel
Determinado, se Car A = n,
Indeterminado, se Car A n, com grau de indeterminação
n − Car A.
Sistema Impossı́vel: Car A Car[A|B]
Exercı́cios:
1. Resolva e classifique o seguinte sistema:
2x − y − z = 1
x + y − z = 2
−x + 2y + 2z = 4
21](https://image.slidesharecdn.com/apostiladealgebralinear-230129200250-d27ddb70/85/Apostila-de-Algebra-Linear-pdf-22-320.jpg)
![2. Considere o sistema de equações lineares sobre R, nas incógnitas x, y, z e t:
x = a − b
5ax − 2by + az + t = 1
−bz = 1
−3ax + 2by − az + (b − a)t = 2a − 1
Utilizando o método de condensação, discuta o sistema em função dos parâmetros a e b.
Cálculo da Matriz Inversa de uma Matriz Regular
Seja A uma matriz quadrada de ordem n. Sabemos que A é regular (isto é, invertı́vel) se
existe uma matriz quadrada, com a mesma ordem, B tal que
AB = BA = I.
Vamos determinar a matriz B tal que
AB = I
e em seguida mostraremos que essa matriz B também é inversa à esquerda, isto é, BA = I.
Representemos B por X, e Xj e Ij, respectivamente, as j-ésimas colunas de X e I. Assim,
a equação matricial AX = I é equivalente a n sistemas de equações lineares:
AXj = Ij
j = 1, . . . , n
Pelo que vimos anteriormente, tais sistemas têm solução única se, e somente se, Car A = n.
Cada um dos sistemas é resolvido passando da matriz ampliada [A|Ij] para a matriz [I|Xj].
Isto é equivalente à passagem de [A|I] para [I|X] efectuando as operações elementares nos
n sistemas.
Exercı́cio: Determine a inversa à direita da matriz
A =
2 0 2
−1 1 −3
0 2 1
.
Mostremos agora que a existência de uma inversa à direita garante a existência de inversa
à esquerda e que elas são iguais.
Sabemos que se A tem inversa X à direita se, e somente se, Car A = n (ordem de A).
Desta forma, AT
também tem inversa à direita, digamos Y, isto é, AT
Y = I. Logo,
AT
Y
T
= IT
⇔ Y T
A = I,
isto é, a matriz A tem inversa à esquerda.
22](https://image.slidesharecdn.com/apostiladealgebralinear-230129200250-d27ddb70/85/Apostila-de-Algebra-Linear-pdf-23-320.jpg)


![- Multiplicação escalar: definida por
( ) ( )
n
2
1
n
2
1 x
,
,
x
,
x
x
,
,
x
,
x α
α
α
=
α K
K ;
(em que as operações que figuram nos n-uplos dos segundos membros das
igualdades anteriores são as operações adição e multiplicação em k).
Nota: Dado um corpo K, sempre que seja feita referência ao espaço vectorial K
n
sobre o
corpo K, assumiremos que as operações consideradas são as usuais, a menos que seja dito
o contrário.
7. Para cada n IN , o conjunto IR
∈
n
(respectivamente, C
n
) é um espaço vectorial real
(respectivamente, complexo).
8. Para cada IN,o conjunto C
∈
n
n
é um espaço vectorial real.
9. O conjunto de todos os polinómios na variável x, com coeficientes em K, de grau não
superior a n ( IN) é um espaço vectorial sobre K (K = IR ou K = C
) com as operações
definidas por:
∈
n
( ) ( )
( ) ( ) ( ) ( ) n
n
n
2
2
2
1
1
0
0
n
n
2
2
1
0
n
n
2
2
1
0
x
b
a
x
b
a
x
b
a
b
a
x
b
x
b
x
b
b
x
a
x
a
x
a
a
+
+
+
+
+
+
+
+
=
=
+
+
+
+
+
+
+
+
+
L
L
L
e
( ) ( ) ( ) ( ) ( n
n
2
2
1
0
n
n
2
2
1
0 x
a
x
a
x
a
a
x
a
x
a
x
a
a α
+
+
α
+
α
+
α
=
+
+
+
+
α L
L ) .
10. O conjunto de todos os polinómios na variável x, com coeficientes em K, é um espaço
vectorial sobre K, com as operações definidas de forma análoga às definidas em 9 (ditas
usuais).
Propriedades dos Espaços Vectoriais:
1. ( ) y
x
y
x
,
E
y
,
x
,
K α
−
α
=
−
α
∈
∀
∈
α
∀
De facto, tem-se
( ) ( )
[ ] x
y
y
x
y
y
x α
=
+
−
α
=
α
+
−
α ,
atendendo-se à propriedade i) da multiplicação escalar e a ( )
+
,
E ser um grupo.
2. 0
0
,
K =
α
∈
α
∀
É um caso particular de 1. para .
y
x =
3. ( ) ( )
y
y
,
E
y
,
K α
−
=
−
α
∈
∀
∈
α
∀
É um caso particular de 1. para .
0
x =
4. ( ) x
x
x
,
E
x
,
K
, β
−
α
=
β
−
α
∈
∀
∈
β
α
∀
De facto, tem-se
( ) ( )
[ ] x
x
x
x α
=
β
+
β
−
α
=
β
+
β
−
α
25](https://image.slidesharecdn.com/apostiladealgebralinear-230129200250-d27ddb70/85/Apostila-de-Algebra-Linear-pdf-26-320.jpg)

![é também um subespaço vectorial de E.
Demonstração: Exercício.
Seja E um espaço vectorial sobre um corpo K e E
x
,
,
x
,
x n
2
1 ∈
K . Todo o vector v que
se pode exprimir sob a forma
n
n
2
2
1
1 x
x
x
v α
+
+
α
+
α
= L ,
com ,
i diz-se combinação linear dos vectores
,
K
i ∈
α n
,
,
1 K
= .
x
,
,
x
,
x n
2
1 K
Analogamente, se A é um subconjunto de E, então qualquer vector de E da forma
n
n
2
2
1
1 x
x
x α
+
+
α
+
α L ,
com e
K
,
,
, n
2
1 ∈
α
α
α K ,
A
x
,
,
x
,
x n
2
1 ∈
K diz-se combinação linear (finita) de elementos
de A.
Obs.: É óbvio que qualquer elemento de A é combinação linear de elementos de A. De facto,
se podemos escrever
,
A
x ∈
,
x
0
x
0
x
1
x n
2 ⋅
+
+
⋅
+
⋅
= L
com .
A
x
,
,
x
,
x n
3
2 ∈
K
Exercício: Dados os vectores, em IR
4
,
( b
,
a
,
1
,
1
u = ) ( )
3
,
1
,
1
,
3
v = ( )
5
,
1
,
0
,
2
w = ,
determine o valor das constantes a e b por forma a ser possível escrever o vector u
como combinação linear dos vectores v e w.
Teorema 3.5: Seja E um espaço vectorial sobre um corpo K e A uma parte não vazia de E. O
conjunto F de todas as combinações lineares de elementos de A é o “menor” subespaço
vectorial de E que contém A.
Demonstração: Exercício.
Sendo A uma parte não vazia do espaço vectorial E definido sobre um corpo K, o
subespaço F de E formado por todas as combinações lineares de elementos de A diz-se
subespaço gerado por A, ou, também, que A gera o subespaço F.
No caso de F coincidir com o próprio E, diz-se que os vectores de A constituem um
sistema de geradores de E.
Notação: O subespaço gerado por A representa-se por
A ou [ ]
A ou ainda ,
x
,
,
x
,
x n
2
1 K
se .
{ }
n
2
1 x
,
,
x
,
x
A K
=
Em resumo: se F for o subespaço gerado pelo conjunto { }
n
2
1 x
,
,
x
,
x K ,
27](https://image.slidesharecdn.com/apostiladealgebralinear-230129200250-d27ddb70/85/Apostila-de-Algebra-Linear-pdf-28-320.jpg)



![Exercícios:
1. Indique a condição a que deve satisfazer λ de modo a que os vectores ( ), ( ) e
constituam uma base de IR
1
,
0
,
1 0
,
,
0 λ
( λ
,
0
,
1 ) 3
.
2. Considere o seguinte subespaço vectorial do espaço vectorial IR
4
:
( )
{ ∈
= t
,
z
,
y
,
x
A IR
4
: }
0
t
z
y
x =
+
−
− .
Determine uma base e a dimensão do subespaço A.
Pelo que vimos anteriormente, fixada uma base { }
n
2
1 e
,
,
e
,
e K no espaço E, cada
vector de E fica bem definido pelas suas coordenadas, isto é, pelos escalares que aparecem
em:
( )
n
2
1 ,
,
, α
α
α K ou [ ]
n
2
1 α
α
α L ou em .
α
α
α
n
2
1
M
Exemplo: No espaço dos polinómios de grau não superior a 3, { }
3
2
x
,
x
,
x
,
1 é uma base. Nesta
base, as coordenadas do polinómio são
3
2
x
5
x
4
x
2 −
+
+
− [ ]
5
4
1
2 −
− .
Aplicações Lineares
Definição 3.16: Sejam E e F dois espaços vectoriais definidos sobre o mesmo corpo K e ϕ
uma aplicação de E em F. Se é tal que
ϕ
( ) ( ) ( )
y
x
y
x
,
E
y
,
x ϕ
+
ϕ
=
+
ϕ
∈
∀
( ) ( )
x
x
,
E
x
,
K αϕ
=
α
ϕ
∈
∀
∈
α
∀
então diz-se que é uma aplicação linear, um homomorfismo ou uma transformação
linear de E em F.
ϕ
Uma aplicação linear de E em E diz-se um endomorfismo.
Um aplicação linear bijectiva diz-se também um isomorfismo de E em F. Caso exista
esse isomorfismo diz-se que E e F são espaços isomorfos. Um isomorfismo de E em E
denomina-se automorfismo.
Observação: Pode mostrar-se que as duas proposições da definição de aplicação linear são
equivalentes à proposição: ( ) ( ) (y
x
y
x
,
E
y
,
x
,
K
, )
βϕ
+
αϕ
=
β
+
α
ϕ
∈
∀
∈
β
α
∀ .
Exemplos:
31](https://image.slidesharecdn.com/apostiladealgebralinear-230129200250-d27ddb70/85/Apostila-de-Algebra-Linear-pdf-32-320.jpg)
![1. A aplicação f de IR
3
em IR
2
definida por ( ) ( )
z
y
x
,
x
z
,
y
,
x
f +
+
= .
2. Homotetia (em IR
3
): .
( ) ( z
2
,
y
2
,
x
2
z
,
y
,
x a )
3. Rotação (em IR
2
): ( ) ( x
,
y
y
,
x −
a ) (rotação de
2
π
)
ou ( ) ( ) ( )
+
−
2
y
x
2
,
2
y
x
2
y
,
x a (rotação de
4
π
)
Exercício: Verifique se a seguinte aplicação é linear:
:
f IR
3
→ IR
2
( ) ( )
z
y
,
y
x
z
,
y
,
x −
−
a .
Representaremos por L o conjunto de todas as aplicações lineares de E em F,
com E e F espaços vectoriais sobre um mesmo corpo K.
( F
,
E )
Observação: Prova-se que o conjunto L ( )
F
,
E é um espaço vectorial sobre K, para as
operações:
Adição: ∈
ψ
ϕ,
∀ L ,
( )
F
,
E ( )( ) ( ) ( )
x
x
x ψ
+
ϕ
=
ψ
+
ϕ .
Multiplicação Escalar: ∈
ϕ
∀
∈
α
∀ ,
K L ( )
F
,
E , ( )( ) ( )
[ ]
x
x ϕ
α
=
αϕ .
Propriedades das Aplicações Lineares:
Sejam ∈
ϕ L ( )
F
,
E e ψ L
∈ ( )
G
,
F , com E, F e G espaços vectoriais sobre o mesmo
corpo K.
1. ( ) .
0
0 =
ϕ
2. é uma aplicação linear de E em G.
ϕ
ψ o
3. é um subespaço vectorial de F.
( )
E
ϕ
4. , denominado núcleo da aplicação linear ϕ , é um
subespaço vectorial de E.
{ }
( ) ( )
{ 0
x
:
E
x
0
N 1
=
ϕ
∈
=
ϕ
= −
ϕ }
5. ( ) ( ) ( )
( )
E
dim
N
dim
E
dim ϕ
+
= ϕ .
6. A aplicação é injectiva se, e somente se,
ϕ { }
0
N =
ϕ .
Exercício: Considere a aplicação linear
:
f IR
3
→ IR
2
( ) ( )
z
y
,
y
x
z
,
y
,
x −
−
a .
a) Determine . A aplicação f é injectiva?
f
N
b) Determine dim (f (IR
3
)).
Teorema 3.17: Sejam E e F dois espaços vectoriais sobre o mesmo corpo K, { }
uma base de E e uma aplicação linear de E em F. Sejam f respectivamente, as
imagens por dos vectores da base de E, isto é,
n
2
1 e
,
,
e
,
e K
ϕ ,
f
,
,
f
, n
2
1 K
ϕ n
2
1 e
,
,
e
,
e K
32](https://image.slidesharecdn.com/apostiladealgebralinear-230129200250-d27ddb70/85/Apostila-de-Algebra-Linear-pdf-33-320.jpg)



![∑
=
β
=
α
n
1
j
j
ij
i t
ou
β
=
α T ,
onde designa a matriz coluna e
α [ T
n
1 α
α L ] β a matriz coluna [ ]T
n
1 β
β L .
Analogamente, se T designar a matriz quadrada de ordem n cuja coluna j é formada
pelas coordenadas de e relativamente à base
′
j { }
n
2
1 e
,
,
e
,
e ′
′
′ K , isto é, se T é a matriz de
passagem da base {
′
}
n
1 e
,
e ′
2 , e
,
′
′ K para a base { }
n
2 e
,
,
e K
1,
e , tem-se
α
′
=
β T .
Combinando estas duas relações, tem-se
α
α
α
′
⋅
=
β
β
β
=
α
α
α
n
2
1
n
2
1
n
2
1
T
T
T
M
M
M
e também
β
β
β
⋅
′
=
α
α
α
′
=
β
β
β
n
2
1
n
2
1
n
2
1
T
T
T
M
M
M
.
Então , isto é, é a matriz inversa de T, ou seja T
n
I
T
T
T
T =
⋅
′
=
′
⋅ T′ 1
T−
=
′ .
Considere-se agora uma aplicação linear ∈
ϕ L ( )
F
,
E e vejamos que alterações
ocorrem na matriz de ϕ quando se mudam as bases de E e F.
Teorema 3.20: Sejam e
{ }
n
2
1 e
,
,
e
,
e K { }
n
2
1 e
,
,
e
,
e ′
′
′ K duas bases de E e T a matriz de
passagem da base { }
n
2
1 e
,
,
e
, K
e para a base { }
n
2 e
,
,
e
1,
e ′
′
′ K . Sejam { } e
duas bases de F e S a matriz de passagem da base
m
2
1 f
,
,
f
,
f K
{ m
2
1 f
,
,
f
,
f ′
′
′ K } { }
m
f
,
2
1 ,
f
,
f K para a base
. Seja A=
{ }
m
2
1 f
,
,
f
,
f ′
′
′ K ( )
}
f
{
},
e
{
, i
j
ϕ
M e A′ = ( )
}
f
{ i
},
e
{
, j
M ′
′
ϕ . Então podemos afirmar que
T
A
S
A 1
⋅
⋅
=
′ −
.
As matrizes A e , do tipo
A′ n
m× , por satisfazerem à relação ou à
relação equivalente , com S e T matrizes regulares, de ordem m e n
respectivamente, dizem-se matrizes equivalentes.
T
A
S
A 1
⋅
⋅
=
′ −
1
T
A
A −
⋅
′
S⋅
=
É óbvio que A e têm a mesma característica. No caso particular em que
A′ ,
F
E =
isto é, no caso em que ∈
ϕ L , tem-se
( E
,
E )
T
A
T
A 1
⋅
⋅
=
′ −
,
36](https://image.slidesharecdn.com/apostiladealgebralinear-230129200250-d27ddb70/85/Apostila-de-Algebra-Linear-pdf-37-320.jpg)






![Observação: Se uma função n-linear é anti-simétrica e σ é uma permutação de S , então
n
( ) ( ) ( )
( ) ( ) ( )
n
2
1
n
2
1 x
,
,
x
,
x
f
x
,
,
x
,
x
f K
K σ
ε
=
σ
σ
σ .
A partir de agora consideraremos sempre um corpo K de característica diferente 2. O
corpo dos reais ou dos complexos são considerados corpos de característica zero (ou infinita).
Seja A uma matriz quadrada de ordem n sobre K, isto é,
=
nn
2
n
1
n
n
2
22
21
n
1
12
11
a
a
a
a
a
a
a
a
a
A
L
L
L
L
L
L
L
.
É evidente que uma matriz pode identificar-se com um elemento de n
n
n
K
K
K ×
×
× L
n
,
bastando identificar cada uma das suas linhas, L como elementos de
,
L
,
,
L
, n
2
1 K K . Assim,
no contexto de podemos definir a seguinte função n-linear:
( n
,
n
MK )
Definição 4.13: Chama-se determinante de ( )
n
,
n
M
A K
∈ à função n-linear alternada das
linhas de A definida por:
[ ] ( ) ( ) ( ) ( )
∑
∈
σ
σ
σ
σ ⋅
σ
ε
=
=
=
n
S
n
n
2
2
1
1
ij a
a
a
A
A
det
a
A L
a .
Observação: O determinante de uma matriz quadrada não é mais do que a soma de todos os
produtos de n elementos da matriz, correspondentes a cada uma das permutações de S ,
afectados pelo sinal da permutação correspondente. Assim, o número de parcelas é igual a n .
n
!
]
A partir da definição, podemos facilmente constatar que:
- Se A , então .
[ 11
a
= 11
a
A
det =
- Se A , então det
=
22
21
12
11
a
a
a
a
21
12
22
11 a
a
a
a
A −
= , já que S , sendo a
permutação par e a permutação ímpar.
=
1
2
2
1
,
2
1
2
1
2
2
1
2
1
1
2
2
1
Assim, o determinante de uma matriz quadrada de ordem 2 é igual à diferença entre o
produto dos elementos principais e o produto dos elementos da diagonal secundária.
- Se A , então
=
33
32
31
23
22
21
13
12
11
a
a
a
a
a
a
a
a
a
43](https://image.slidesharecdn.com/apostiladealgebralinear-230129200250-d27ddb70/85/Apostila-de-Algebra-Linear-pdf-44-320.jpg)
![32
23
11
33
21
12
31
22
13
32
21
13
31
23
12
33
22
11
33
32
31
23
22
21
13
12
11
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
−
−
−
+
+
= ,
já que as permutações de S são:
3
3
2
1
3
2
1
, , , , , .
1
3
2
3
2
1
2
1
3
3
2
1
1
2
3
3
2
1
3
1
2
3
2
1
2
3
1
3
2
1
Em termos práticos, o cálculo do determinante de uma matriz quadrada de ordem 3
pode ser efectuado usando a Regra de Sarrus: as parcelas de sinal positivo do
determinante são referentes ao produto dos elementos principais e aos produtos dos
elementos que se dispõem nos vértices dos dois triângulos cuja base é paralela à diagonal
principal, e as parcelas de sinal negativo do determinante são referentes ao produto dos
elementos da diagonal secundária e aos produtos dos elementos que se dispõem nos
vértices dos dois triângulos cuja base é paralela à diagonal secundária. Observe o
esquema:
33
32
31
23
22
21
13
12
11
a
a
a
a
a
a
a
a
a
Exercício: Calcule o determinante das seguintes matrizes:
a) b) c)
−
1
3
5
2
−
−
−
3
3
1
1
2
1
4
0
2
−
−
−
1
2
3
2
4
2
1
2
1
No cálculo do determinante de uma matriz de ordem superior ou igual a 4 não é usual
aplicar-se a definição de determinante, pois torna-se um cálculo fastidioso. No entanto,
iremos estudar propriedades que facilitam esses cálculos. Antes dessas propriedades,
estudemos agora as propriedades básicas dos determinantes.
Propriedades dos Determinantes:
Seja A uma matriz quadrada de ordem n.
1. (n-linear) Se uma fila de A se decompuser numa soma de filas, o determinante de A é
igual à soma dos determinantes de duas matrizes em que nessa fila se usa uma parcela de
cada vez, mantendo-se as restantes. Isto é,
[ ] [ ] [ ]
n
i
1
n
i
1
n
i
i
1 F
,
,
F
,
,
F
det
F
,
,
F
,
,
F
det
F
,
,
F
F
,
,
F
det K
K
K
K
K
K ′
+
=
′
+ .
2. (n-linear) Se multiplicarmos uma fila de A por um escalar α , então o determinante vem
multiplicado por , isto é,
α
[ ] [ ]
n
i
1
n
i
1 F
,
,
F
,
,
F
det
F
,
,
F
,
,
F
det K
K
K
K α
=
α .
44](https://image.slidesharecdn.com/apostiladealgebralinear-230129200250-d27ddb70/85/Apostila-de-Algebra-Linear-pdf-45-320.jpg)
![Assim, também temos que A
A n
α
=
α .
3. (Anti-simetria) Ao trocarmos entre si duas filas paralelas de A, o determinante troca de
sinal, isto é,
[ ] [ ]
n
i
j
1
n
j
i
1 F
,
,
F
,
,
F
,
,
F
det
F
,
,
F
,
,
F
,
,
F
det K
K
K
K
K
K −
= .
4. (Função alternada) Se as filas de A são linearmente dependentes, então o determinante
de A é igual a zero.
5. Não se altera o determinante de A quando a uma fila se adiciona uma combinação linear
de outras filas paralelas. Basta observar que:
[ ] [ ] [ ]
n
j
j
1
n
i
1
n
j
i
1 F
,
,
F
,
,
F
,
,
F
det
F
,
,
F
,
,
F
det
F
,
,
F
F
,
,
F
det K
K
K
K
K
K
K α
+
=
α
+ .
6. . Pois, representando a por a , cada parcela de det é da forma
A
det
A
det T
= ji
T
ij
T
A
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
n
n
1
1
1
n
n
1
1
n
n
1
1
T
n
n
T
1
1 1
1
1
1 a
a
a
a
a
a
a
a −
−
−
−
σ
σ
−
σ
σ
σ
σ
σ
σ σ
ε
=
σ
ε
=
σ
ε
=
σ
ε L
L
L
L ,
isto é, corresponde a outro termo de , com o mesmo sinal.
A
det
7. ∗
=
= A
det
A
det
A
det .
8. Se A é uma matriz triangular, então
nn
22
11 a
a
a
A
det L
= .
Em particular, .
1
I
det =
9. A característica da matriz A é inferior à ordem se, e somente se, , isto é, A é
uma matriz singular se, e somente se, det
0
A
det =
0
A = . Evidentemente, A é regular se, e somente
se, .
0
A
det ≠
10. B
A
B
A ⋅
=
⋅ .
11. Se A é regular, então
A
1
A 1
=
−
.
12. A característica da matriz A é igual à mais alta ordem das submatrizes quadradas de A
com determinante não nulo.
Exercício: Sejam A e B duas matrizes quadradas de ordem 2 tais que .
Calcule
B
det
2
A
det −
=
=
( )
( )
[ ]
T
1
AB
2
det
−
.
Complementos Algébricos
Definição 4.14: Seja A uma matriz quadrada de ordem n. Chama-se menor de ordem m de A
ao determinante de qualquer submatriz de A de ordem m ( n
m ).
Dois menores dizem-se complementares se num deles estão representadas
exactamente as linhas e colunas de A que não figuram no outro.
Um menor diz-se principal se a sua diagonal tem somente elementos principais da
matriz inicial.
Um menor de A diz-se par ou ímpar conforme é par ou ímpar a soma dos índices das
linhas e das colunas de A nele representadas.
45](https://image.slidesharecdn.com/apostiladealgebralinear-230129200250-d27ddb70/85/Apostila-de-Algebra-Linear-pdf-46-320.jpg)

![Teorema 4.16: A soma dos produtos dos elementos de uma fila pelos complementos
algébricos dos elementos homólogos de outra fila paralela é nula, isto é,
hn
in
2
h
2
i
1
h
1
i A
a
A
a
A
a
0 +
+
+
= L (i h
≠ )
ou
nk
nj
k
2
j
2
k
1
j
1 A
a
A
a
A
a
0 +
+
+
= L ( k
j ≠ ).
Demonstração: Essa soma é igual ao determinante da matriz obtida substituindo a linha i pela
linha h (ou coluna j pela coluna k). Desta forma, a matriz fica com duas filas iguais e portanto
o determinante é nulo.
Este teorema e o teorema de Laplace permitem escrever:
∑
∑ =
=
=
=
n
1
i
ij
ij
n
1
j
ij
ij A
a
A
a
A e 0 ,
)
h
i
e
k
j
(
A
a
A
a
n
1
i
ik
ij
n
1
j
hj
ij ≠
≠
=
= ∑
∑ =
=
isto é, usando o símbolo de Kronecker,
A
A
a ih
n
1
j
hj
ij δ
=
∑
=
ou A
A
a jk
n
1
i
ik
ij δ
=
=
∑ .
Teorema 4.17: (Teorema de Laplace Generalizado) Um determinante de uma matriz é
igual à soma dos produtos dos menores de ordem m contidos em m filas paralelas pelos
respectivos complementos algébricos.
Exercício: Seja . Utilize o teorema de Laplace generalizado para
calcular
−
−
−
=
1
2
5
3
4
2
0
1
0
1
1
3
4
1
0
0
2
1
0
0
4
5
0
3
1
A
A .
Definição 4.18: Seja A uma matriz quadrada. Chama-se adjunta de A à matriz que desta se
obtém substituindo cada elemento pelo seu complemento algébrico e transpondo a matriz
resultante.
Notação: A adjunta de uma matriz A é representada por adj A ou .
Â
De acordo com a definição anterior, se [ ]
ij
a
A = , então a matriz adjunta de A é tal
que adjA .
[ ] [ ji
T
ij A
A =
= ]
Exercício: Determine a matriz adjunta da matriz .
−
−
=
0
1
1
0
0
1
2
1
0
A
47](https://image.slidesharecdn.com/apostiladealgebralinear-230129200250-d27ddb70/85/Apostila-de-Algebra-Linear-pdf-48-320.jpg)
![Teorema 4.19: Seja A uma matriz quadrada de ordem n regular. Então I
A
adjA
A ⋅
=
⋅ e
1
n
A
adjA
−
= .
Demonstração: Basta observar que multiplicando A e , obtemos:
adjA
[ ] ,
b
adjA
A ij
=
⋅ com ∑ δ
=
=
k
ij
jk
ik
ij A
A
a
b e [ ] ,
c
A ij
=
⋅
adjA com ∑ δ
=
=
k
ij
kj
ki
ij A
a
A
c .
Assim, podemos concluir que I
A
A ⋅
=
⋅
adjA
adjA
A =
⋅ . E desta fórmula, usando as
propriedades dos determinantes e o facto de A ser regular, temos que
1
n
n
A
adjA
A
adjA
A
I
A
adjA
A
−
=
⇔
=
⋅
⇔
⋅
=
⋅
Corolário 4.20: Se A é uma matriz quadrada regular, então
adjA
A
1
A 1
⋅
=
−
.
Demonstração: Usando-se o teorema 4.19, resulta de imediato que
I
A
adjA
A
1
adjA
A
1
A =
⋅
⋅
=
⋅
⋅ .
Este corolário dá-nos assim um novo processo para calcular a inversa de uma matriz
regular.
Exercício: Utilizando a última propriedade, determine, caso exista, a matriz inversa da matriz
−
−
=
0
1
1
0
0
1
2
1
0
A .
Resolução de Sistemas de Equações Lineares Usando a Teoria dos Determinantes
Seja
=
+
+
+
=
+
+
+
m
n
mn
2
2
m
1
1
m
1
n
n
1
2
12
1
11
b
x
a
x
a
x
a
b
x
a
x
a
x
a
L
M
L
,
um sistema de m equações lineares com n incógnitas, sobre um corpo K. Já sabemos que este
sistema é equivalente à equação matricial AX B
= , com
48](https://image.slidesharecdn.com/apostiladealgebralinear-230129200250-d27ddb70/85/Apostila-de-Algebra-Linear-pdf-49-320.jpg)








![Definição 5.5: Sejam E um espaço euclidiano e { }
0
E
y
,
x ∈ . Define-se ângulo formado pelos
vectores x e y por meio da igualdade
θ
( )
y
x
y
x
cos
⋅
=
θ , π
≤
θ
≤
0 .
Observações:
1. Da definição anterior conclui-se que ( ) θ
⋅
⋅
= cos
y
x
y
x .
2. O ângulo θ já que, pela desigualdade de Cauchy-Schwarz,
[ π
∈ ,
0 ]
( )
( ) ( ) 1
y
x
y
x
1
1
y
x
y
x
y
x
y
x ≤
⋅
≤
−
⇔
≤
⋅
⇔
⋅
≤
e a função cos(x) é uma bijecção de [ ]
π
,
0 em [ ]
1
,
1
− .
Cálculo do Produto Interno de Dois Vectores
Sejam { uma base do espaço unitário E e
}
n
2
1 e
,
,
e
,
e K E
y
,
x ∈ . Então, existem ,
K
, i
i ∈
β
α
tais que
,
n
,
,
1
i K
=
n
n
2
2
1
1 e
e
e
x α
+
+
α
+
α
= L
e
n
n
2
2
1
1 e
e
e
y β
+
+
β
+
β
= L .
Assim, podemos escrever:
( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( )
∑∑
= =
β
α
=
β
α
+
+
β
α
+
β
α
+
+
β
α
+
+
β
α
+
β
α
=
β
+
+
β
α
+
+
α
=
n
1
i
n
1
j
j
i
j
i
n
n
n
n
2
n
2
n
1
n
1
n
n
1
n
1
2
1
2
1
1
1
1
1
n
n
1
1
n
n
1
1
e
e
e
e
e
e
e
e
e
e
e
e
e
e
e
e
e
e
y
x
L
L
L
L
L
(1)
Se representarmos ( )
j
i e
e por a , podemos obter a matriz
ij [ ]
ij
a
=
A e deste modo, a expressão (1)
para o produto interno de x por y pode escrever-se na forma matricial:
( ) Y
A
X
y
x T
⋅
⋅
= , (2)
em que
α
α
=
n
1
X M , e
β
β
=
n
1
Y M [ ]
ij
a
A = .
57](https://image.slidesharecdn.com/apostiladealgebralinear-230129200250-d27ddb70/85/Apostila-de-Algebra-Linear-pdf-58-320.jpg)

![Se E é um espaço real e det 1
P = , então dizemos que as duas bases o.n. têm a mesma
orientação e obtém-se uma a partir da outra por uma rotação.
Exemplos: As bases { } e
( ) ( ) ( )
1
,
0
,
0
,
0
,
1
,
0
,
0
,
0
,
1 ( ) ( ) ( )
{ }
0
,
1
,
0
,
1
,
0
,
0
,
0
,
0
,
1 não têm a mesma orientação,
pois
1
0
1
0
1
0
0
0
0
1
P
det −
=
= .
Uma rotação em IR
2
é uma aplicação linear que pode ser representada pela matriz ortogonal:
θ
θ
θ
−
θ
=
cos
sen
sen
cos
P .
Produto Vectorial e Misto em IR
3
Definição 5.14: Sejam x e y dois vectores de IR
3
(com o produto escalar usual). Define-se
produto vectorial (ou externo) de x por y, que denotamos por y
x ∧ , do seguinte modo:
- Se x e y são linearmente dependentes, 0
y
x =
∧ .
- Se x e y são linearmente independentes, y
x ∧ é tal que
1. é ortogonal a x e a y.
y
x ∧
2. é uma base directa (ou positiva) (isto é, a matriz de passagem da base
para esta base tem determinante positivo).
( y
x
,
y
,
x ∧
( )
( ,
1
,
0
,
0
,
0
,
1
)
))
( ) ( 1
,
0
,
0
,
0
3. θ
⋅
⋅
=
∧ sen
y
x
y
x , com [ ]
π
∈
θ ,
0 , o ângulo formado pelos vectores x e y.
Observação: A partir de agora consideraremos sempre a base canónica de IR
3
, inclusivé na
Geometria Analítica, representada por três segmentos de recta de origem O e tal que um
observador com a cabeça no sentido de , vê e à sua direita e e à sua esquerda (isto é,
rodando no sentido directo um ângulo de
3
e 1 2
1
e 2
π obtém-se ). Fixando esta base como
positiva, diremos que a base com orientação contrária (isto é, obtida por uma mudança de base
cuja matriz tem determinante negativo) é inversa (ou negativa). Por isto, utiliza-se a notação
em lugar de { }
2
e
( 3
2
1 e
,
e
,
e )
)
3
2
1 e
,
e
,
e .
Cálculo do produto vectorial:
Se ( é uma base de IR
3
2
1 e
,
e
,
e
3
o.n. directa e
3
3
2
2
1
1 e
x
e
x
e
x
x +
+
= , 3
3
2
2
1
1 e
y
e
y
e
y
y +
+
= ,
então
( ) ( ) ( ) 3
1
2
2
1
2
1
3
3
1
1
2
3
3
2 e
y
x
y
x
e
y
x
y
x
e
y
x
y
x
y
x −
+
−
−
−
=
∧ .
59](https://image.slidesharecdn.com/apostiladealgebralinear-230129200250-d27ddb70/85/Apostila-de-Algebra-Linear-pdf-60-320.jpg)

![( ) ( ) ( ) ( ) y
z
x
x
y
z
z
x
y
z
y
x ∧
−
=
∧
−
=
∧
−
=
∧ .
3. O produto misto não se altera por permutação circular dos três vectores ou pela troca dos
sinais e
∧ , isto é,
( ) ( ) ( ) ( )
z
y
x
y
x
z
x
z
y
z
y
x ∧
=
∧
=
∧
=
∧ .
4. ( ) z
y
x ∧
( )
é o volume do paralelepípedo definido pelos três vectores. Observe-se ainda que
cos
z
y
x
z
y
x θ
⋅
⋅
∧
=
∧ , com [ ]
π
∈
θ ,
0 , o ângulo formado pelos vectores e z.
y
x ∧
x
θ z y
y
x ∧
61](https://image.slidesharecdn.com/apostiladealgebralinear-230129200250-d27ddb70/85/Apostila-de-Algebra-Linear-pdf-62-320.jpg)




















![Estudo das Quádricas com as Equações na Forma Canónica
Definição 6.8: Uma quádrica é um conjunto de pontos de R
3
cujas coordenadas cartesianas
satisfazem uma equação algébrica inteira do 2º grau.
A equação de uma quádrica é então da forma:
0
a
z
a
2
z
a
y
a
2
yz
a
2
y
a
x
a
2
xz
a
2
xy
a
2
x
a 44
34
2
33
24
23
2
22
14
13
12
2
11 =
+
+
+
+
+
+
+
+
+
Se designarmos por A a matriz simétrica tal que [ ]
ij
a
=
A e por X a matriz coluna tal que
, então a equação de uma quádrica pode escrever-se na forma matricial:
[ T
1
z
y
x
X = ]
0
AX
XT
= .
Por meio de uma apropriada mudança de referencial (translação da origem e mudança
de base), é possível, para o referencial o.n. escolhido, obter uma equação simplificada da
quádrica, chamada equação canónica (ou equação reduzida).
Equações das quádricas na forma reduzida:
1. Considere-se a equação
1
c
z
b
y
a
x
2
2
2
2
2
2
=
+
+ .
A quádrica representada por esta equação denomina-se elipsóide. Estudemos as
particularidades desta quádrica observando as projecções (ou traço) sobre os planos
coordenados:
- Traço em XOY ( 0
z = ): 1
b
y
a
x
2
2
2
2
=
+ (elipse);
- Traço em YOZ ( 0
x = ): 1
c
z
b
y
2
2
2
2
=
+ (elipse);
- Traço em XOZ ( 0
y = ): 1
c
z
a
x
2
2
2
2
=
+ (elipse).
Assim, obtemos a figura seguinte para um elipsóide:
Os parâmetros a, b e c são os semi-eixos.
82](https://image.slidesharecdn.com/apostiladealgebralinear-230129200250-d27ddb70/85/Apostila-de-Algebra-Linear-pdf-83-320.jpg)











1. O documento apresenta conceitos fundamentais de álgebra linear como grupos, anéis e corpos, e ilustra esses conceitos com exemplos. 2. É introduzido o corpo dos números complexos C, definido como o conjunto {(a,b): a,b ∈ R} munido de operações de adição e multiplicação específicas. 3. Propriedades importantes dos números complexos são apresentadas, incluindo a representação na forma a + bi e operações como conjugação e módulo.




























































