Transferir como PDF, PPTX


![Definição Matemática
• Vantagens (Vetores Linhas)
– Mais fácil escrever [4,5,6] do que
– Leitura Natural
– DirectX usa
• Vantagens (Vetores Coluna)
– Equações (Ex: ABCv parece A(B(C(v))))
– Livros de álgebra linear adotam
– Livros de Computação Gráfica adotam
– OpenGL usa](https://image.slidesharecdn.com/vetorescontematrizes-12848547290746-phpapp02/85/Vetores-Cont-E-Matrizes-12-320.jpg)
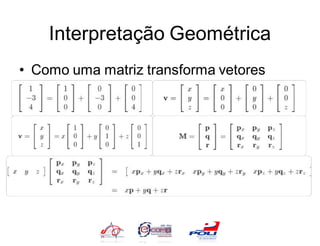
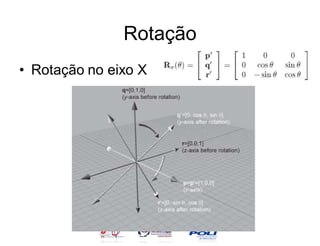
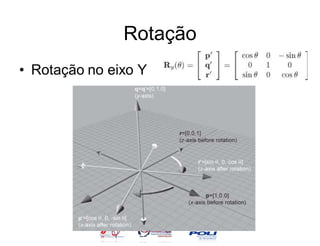
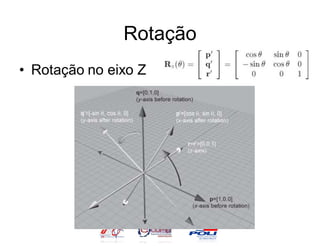
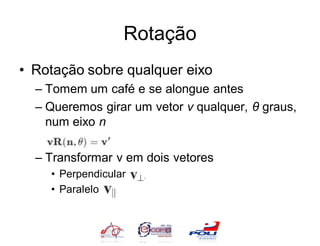
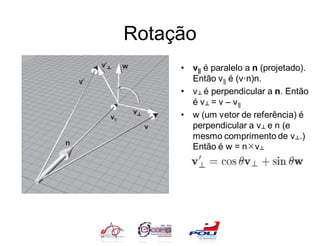
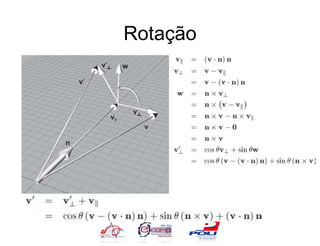
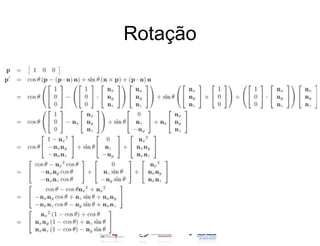
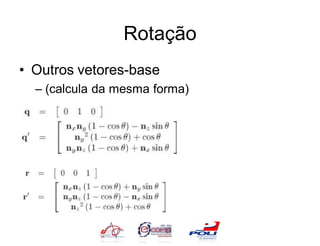
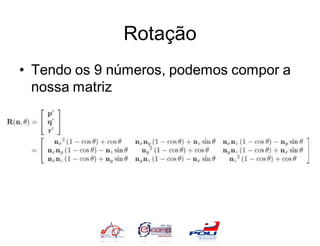
![Rotação
• Iremos agora compor nossa matriz
– Lembre-se: a matriz representa o conjunto de
vetores base após a transformação
– Então iremos usar
• v = [1,0,0]
• v = [0,1,0]
• v = [0,0,1]
– Computar v’ de cada vetor base e juntar para
fazer a matriz.](https://image.slidesharecdn.com/vetorescontematrizes-12848547290746-phpapp02/85/Vetores-Cont-E-Matrizes-33-320.jpg)

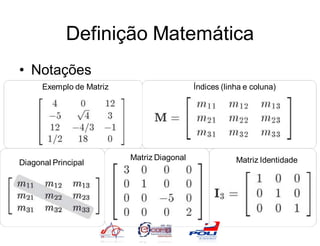
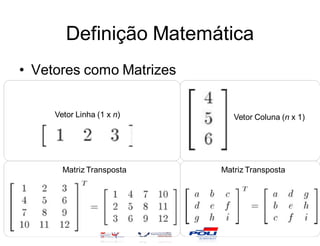
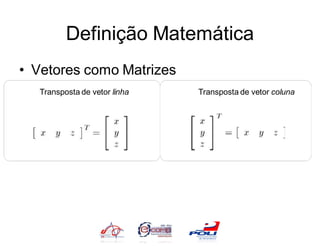
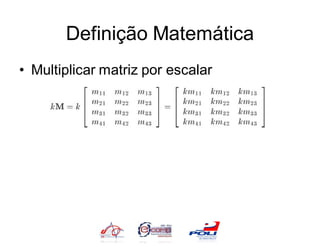
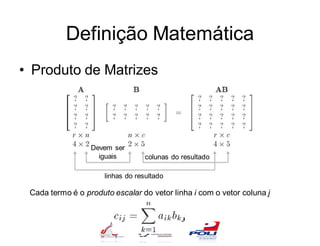
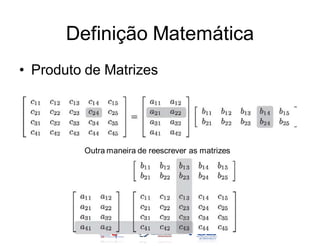
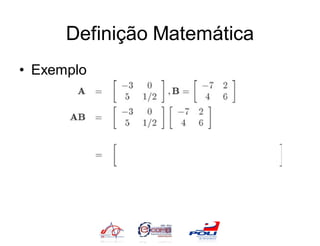
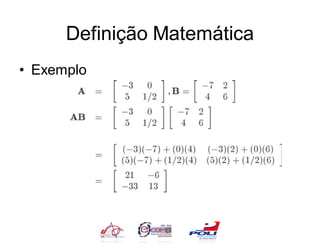
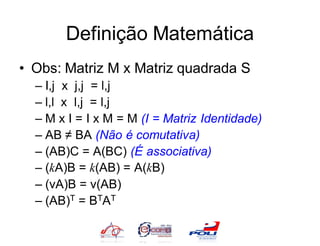
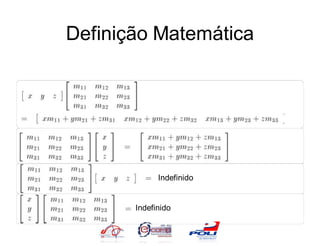
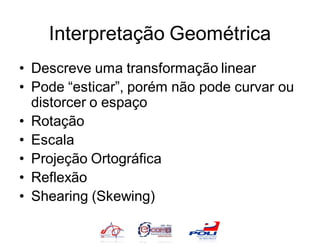
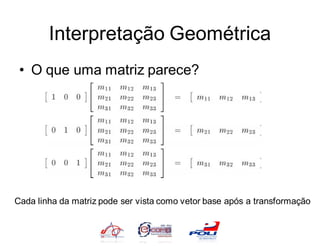
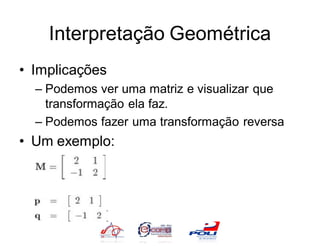
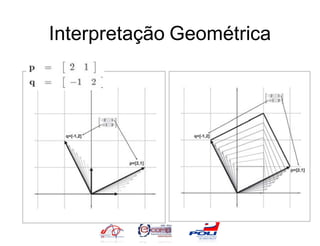
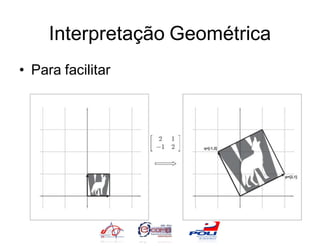
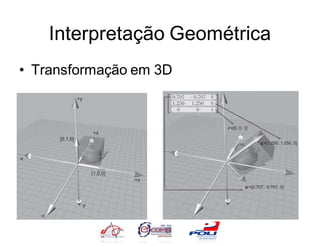
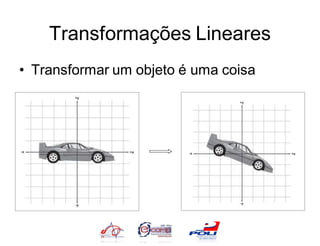
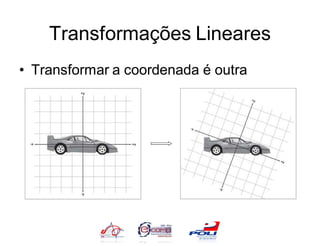
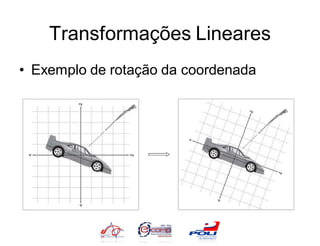
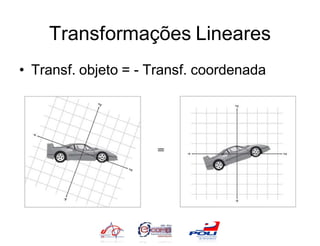
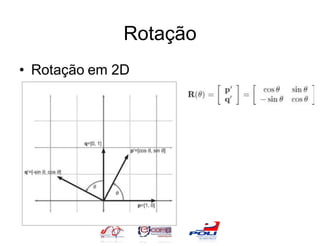
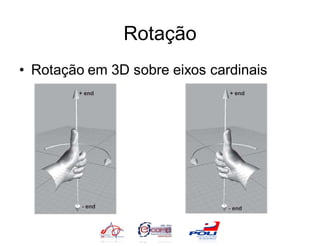
O documento aborda conceitos fundamentais de vetores, matrizes e transformações lineares, incluindo definições, notações e operações matemáticas relevantes. Explora a interpretação geométrica das transformações, como rotação e escala, enfatizando a representação matriz das transformações. Além disso, discute as vantagens de diferentes representações de vetores e a importância de compreender como as matrizes afetam as transformações de objetos e coordenadas.















































