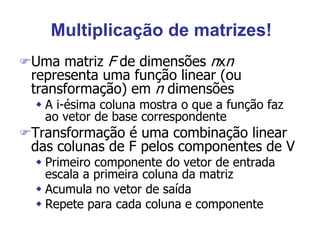
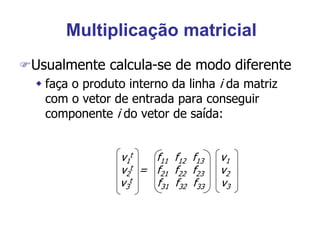
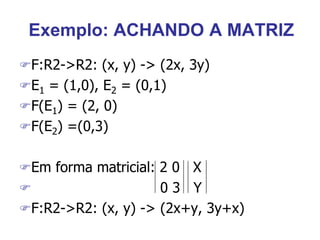
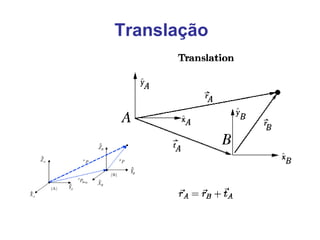
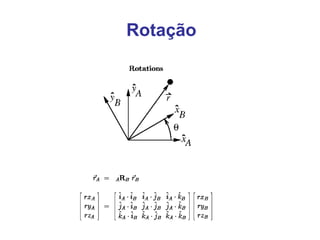
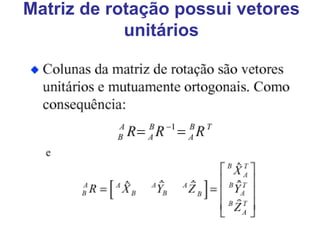
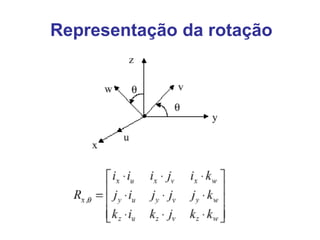
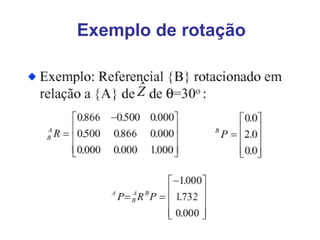
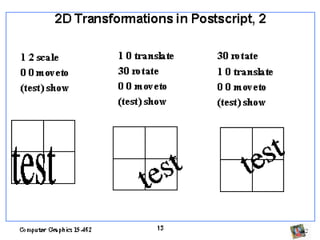
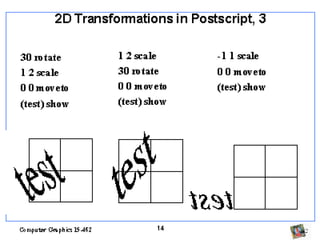
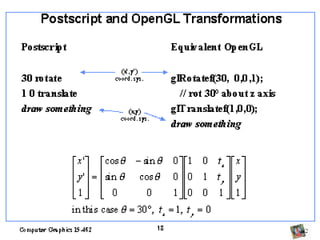
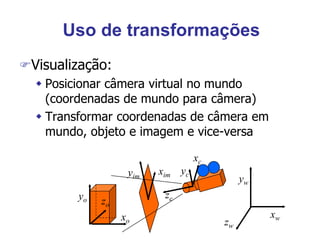
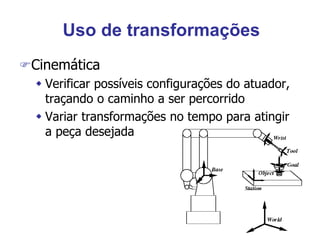
O documento discute transformações geométricas usadas em computação gráfica, incluindo vetores, bases, matrizes de transformação, translação, rotação, escala e composição de transformações. Essas técnicas são aplicadas em modelagem, visualização e animação 3D.

![Vetores
Soma, subtração e multiplicação p/ escalar
Produto escalar: u.v = u1v1+u2v2+…+unvn
Norma: ||v ||= (v1
2+v2
2+…+vn
2)1/2
Unitário: ||v ||= 1
Ângulo: (u,v) = cos-1[(u.v) / (||u|| ||v)]
Ortogonalidade: u.v = 0 ((u,v)=90o)
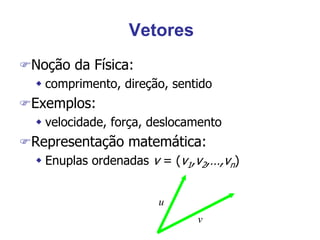
v
u
0](https://image.slidesharecdn.com/transformacao1-230904154424-2842b93e/85/transformacao1-ppt-8-320.jpg)