1) O documento descreve um experimento realizado para verificar a Lei de Hooke usando uma mola.
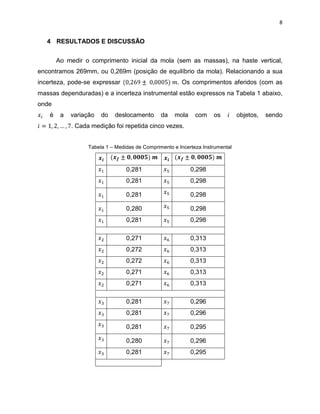
2) Foram medidas as deformações da mola ao aplicar diferentes pesos e usado o método dos mínimos quadrados para encontrar a constante elástica da mola.
3) A constante elástica encontrada foi 13,511 N/m, confirmando que a força elástica da mola varia proporcionalmente à deformação.












![14
REFERÊNCIAS BIBLIOGRÁFICAS
PIACENTINI, João J. [et. al]. Introdução ao laboratório de física. 3.ed. Florianópolis:
Ed. UFSC, 2008. 124p.
YOUNG, Hugh D.; FREEDMAN, Roger A. Física I: mecânica. 12.ed. São Paulo:
Pearson, 2008. 401p.
HALLIDAY, D.; RESNICK, R.; WALKER, J. (org.); BIASI, R. S. (tradução e revisão
técnica). Fundamentos da física, volume 1: mecânica. 8ª ed. LTC – Livros Técnicos e
Científicos Editora S.A., Rio de Janeiro: 2008](https://image.slidesharecdn.com/97386962-relatorio-lei-de-hooke-130403144055-phpapp02/85/relatorio-lei-de-hooke-14-320.jpg)






























































![[Mfl ii] relatório 2 (4)](https://cdn.slidesharecdn.com/ss_thumbnails/mfl-iirelatrio24-121203174418-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)



















