Baixado 52 vezes






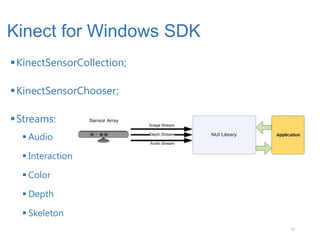




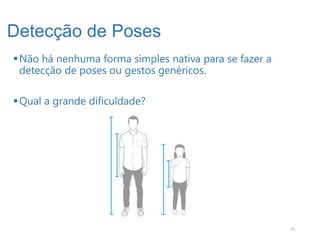


Gabriel Schade Cardoso é um desenvolvedor .NET com experiência em interfaces naturais como o Kinect. O documento descreve as principais funcionalidades do Kinect SDK, incluindo captura de profundidade, reconhecimento de esqueletos, streams de áudio, cores e profundidade. Algoritmos como a lei dos cossenos e produto escalar são usados para detecção de poses e gestos.










































![Apresentação2 3d pa23d [só de leitura]](https://cdn.slidesharecdn.com/ss_thumbnails/apresentao23dpa23dsdeleitura-120521053332-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)





















