Baixado 14 vezes


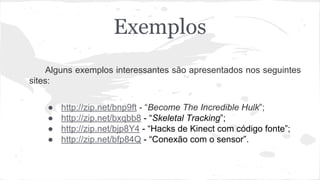
![Profundidade a partir do Stereo
Ao capturar a cena por outro ângulo, os
objetos que estão mais próximos são mais
deslocados que os que estão longe.
Kinect captura e observa a cena de ângulos
diferentes, e infere a profundidade pela
análise do deslocamento no padrão de
salpicamento
[ M. Domínguez-Morales, A. Jiménez-Fernández, R. Paz-
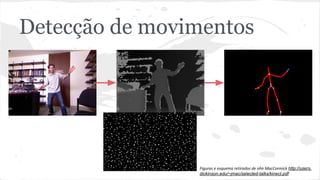
Vicente, A. Linares-Barranco, G. Jiménez-Moreno, 2012 ]](https://image.slidesharecdn.com/seminariokinectmm1-141112095426-conversion-gate01/85/Seminario-Kinect-11-320.jpg)
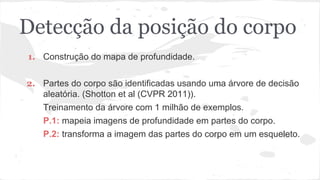


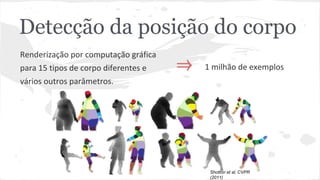
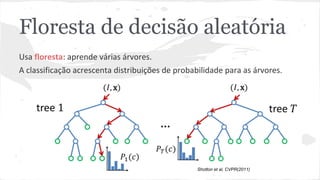
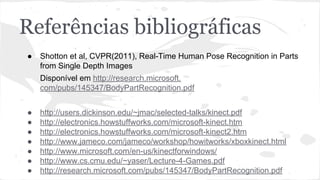
![Floresta de decisão aleatória
Tempo de aprendizado:
1 CPU: 24000 horas.
Implementação distribuída: apenas 1 dia.
● 3 árvores com profundidade 20.
● 1 milhão de imagens.
● 1000 núcleos.
[Shotton et al, CVPR(2011)]](https://image.slidesharecdn.com/seminariokinectmm1-141112095426-conversion-gate01/85/Seminario-Kinect-19-320.jpg)
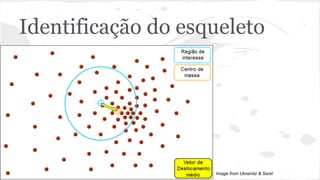
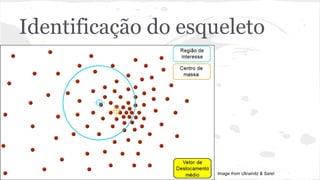
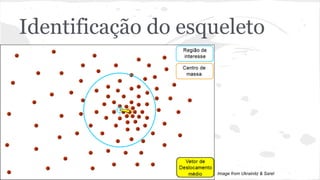

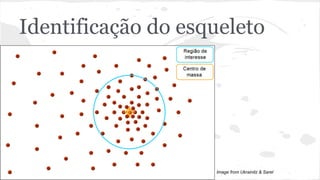


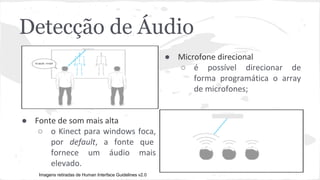

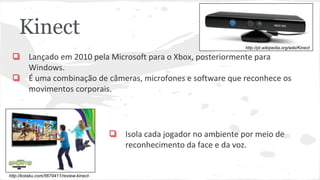
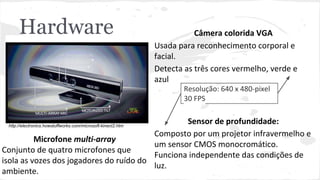
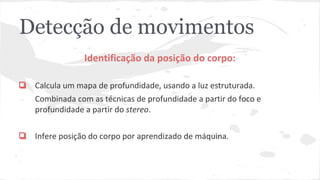
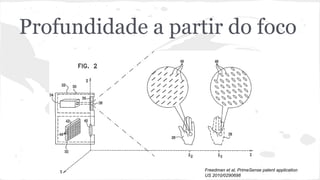
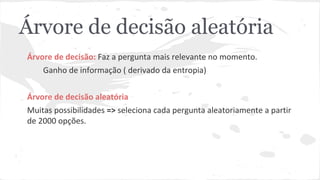
O Kinect é um dispositivo da Microsoft que combina câmeras, microfones e software para reconhecer movimentos corporais e voz sem a necessidade de controles. Ele usa luz infravermelha e sensores para mapear a profundidade e identificar a posição do corpo através de aprendizado de máquina.















































