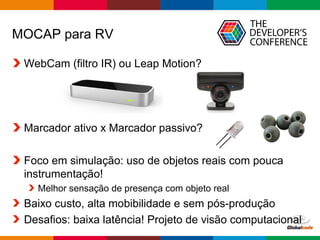
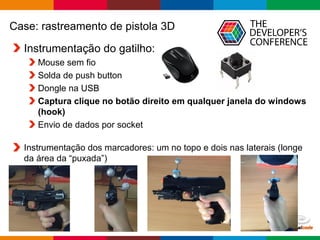
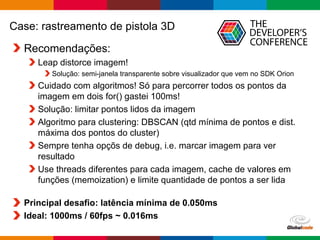
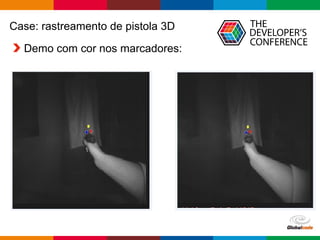
O documento aborda o rastreamento 3D de objetos para realidade virtual, destacando as técnicas de captura de movimentos (mocap) e suas aplicações em áreas como filmes, games e medicina. É apresentado um case específico sobre o rastreamento de uma pistola de ar comprimido, onde desafios como a latência mínima e a instrumentação adequada são discutidos. O autor ressalta a importância da interação com objetos físicos reais para melhorar a experiência de simulação em ambientes de realidade virtual.