Baixado 18 vezes




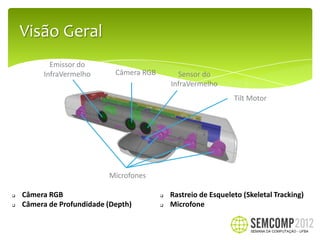




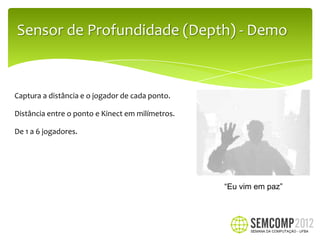

O documento discute o SDK do Kinect como uma plataforma para desenvolvimento de aplicativos para Windows. O Kinect usa câmeras, sensores de profundidade e microfones para rastrear esqueletos, detectar voz e medir distâncias. O documento explica como usar os recursos do Kinect SDK para acessar os dados dos sensores e fornece demonstrações de como rastrear esqueletos, medir profundidade e reconhecer voz.











































![[DevDay2018] Arquitetura de Software num cenário de incertezas - Arquitetura ...](https://cdn.slidesharecdn.com/ss_thumbnails/devday2018-paulovich1-180901143034-thumbnail.jpg?width=640&height=640&fit=bounds)

